災害
陸域観測技術衛星2号「だいち2号」(ALOS-2)初期機能確認期間中の観測画像について (その5・船舶編)
宇宙航空研究開発機構(JAXA)では、2014年5月24日に打ち上げた陸域観測技術衛星2号「だいち2号」(ALOS-2)の初期機能確認試験・各センサの校正・検証作業を実施中です。同衛星の観測データは、災害発生時の状況把握や森林伐採の監視、オホーツクや極域の海氷観測などに貢献することが期待されています。
これまで4回に渡り「だいち2号」に搭載されたLバンド合成開口レーダ(PALSAR-2)※1により、初期機能確認期間中に取得された画像の一部を公開しました。PALSAR-2の画像は様々な応用が考えられていますが、今回はPALSAR-2による船舶検出事例について紹介します。紹介する各観測画像は、「だいち2号」 (ALOS-2) に搭載されたLバンド合成開口レーダ (PALSAR-2) の試験電波発射により取得されたものです。現在、「だいち2号」観測データの品質を向上させるため、校正・検証を行っています。観測データの一般利用者への提供は11月下旬を予定しています。
1. 東京湾の観測結果
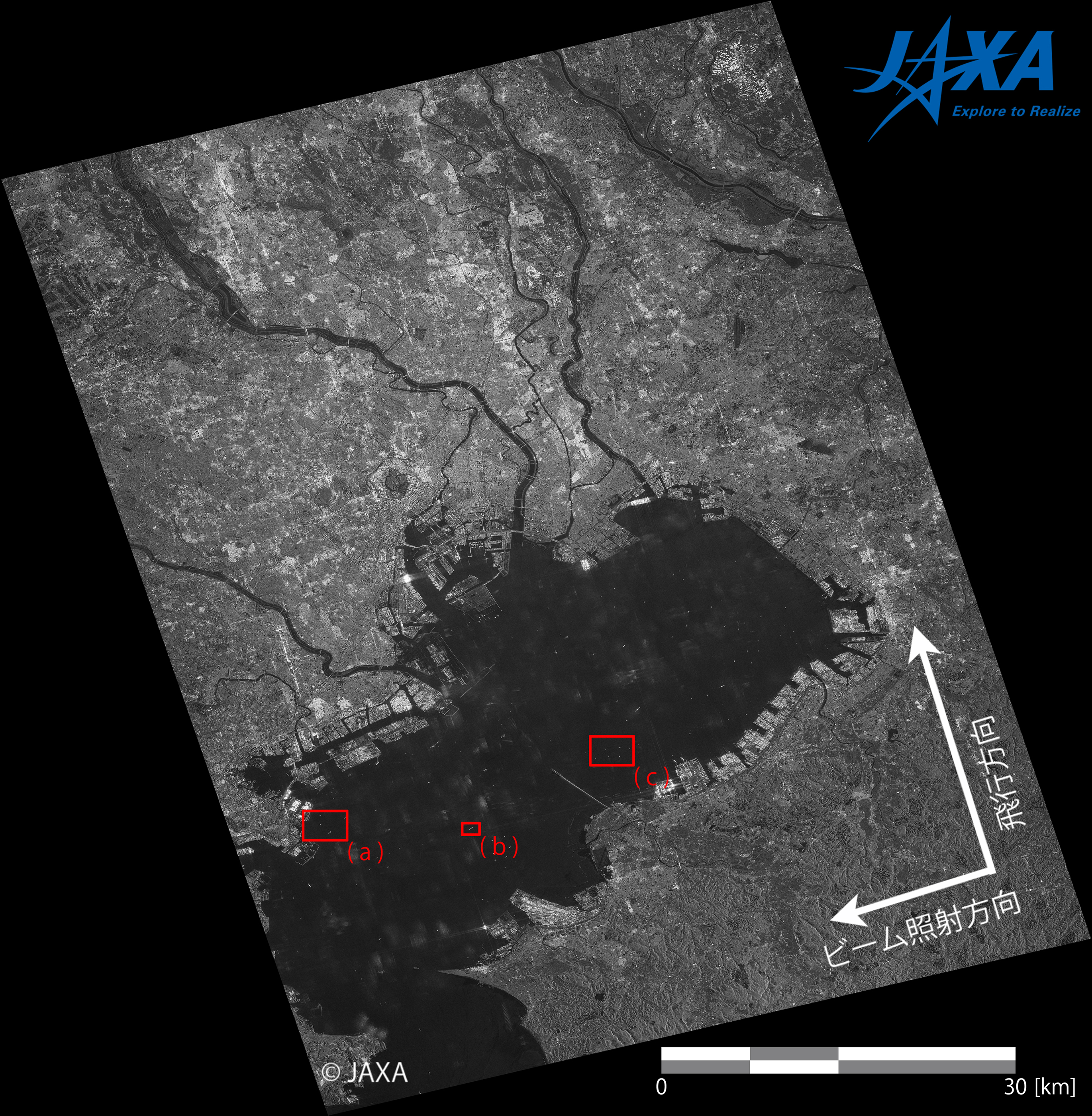
2014年8月29日にPALSAR-2の高分解能(3m)モードで東京湾を含む領域の観測を行いました。図1に観測範囲、図2に観測結果画像、図3に観測結果から確認できた船舶の例を示します。
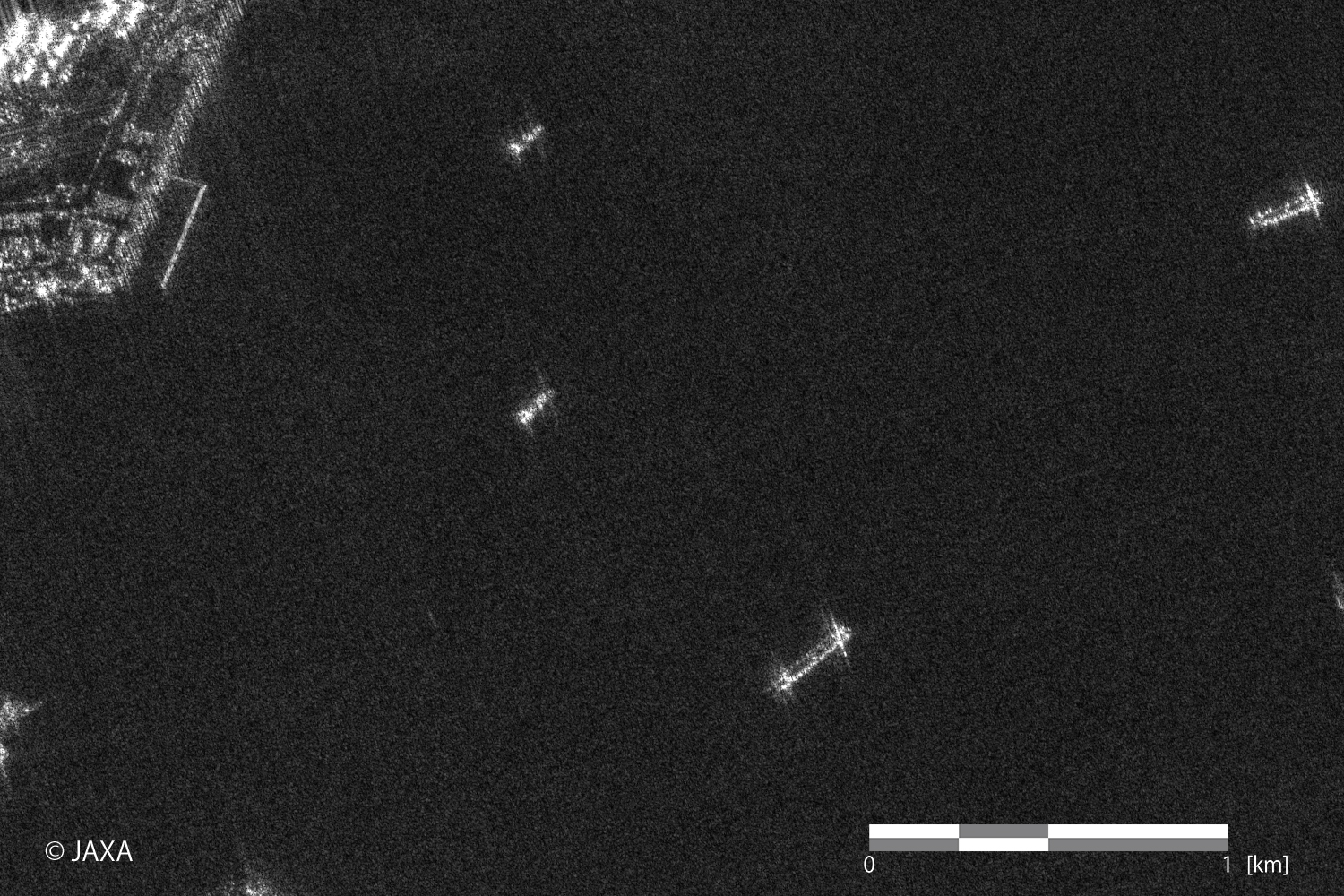
3mという高い分解能によって、船舶の進行方向や詳細な形状がとらえられているという点にご注目ください。例えば、図3中図でとらえられている船舶は、特徴的な形状からバラ積み貨物船と推定できます。船体上の四角形が並んでいる部分が積み込みのハッチに相当します。PALSAR-2では一度に広範囲かつ詳細な画像を得られ、画像上の見え方から船舶の種類を推定することが可能です。
-
 (a)(クリックで拡大画像へ)
(a)(クリックで拡大画像へ) -
(b)(クリックで拡大画像へ)
-
(c)(クリックで拡大画像へ)
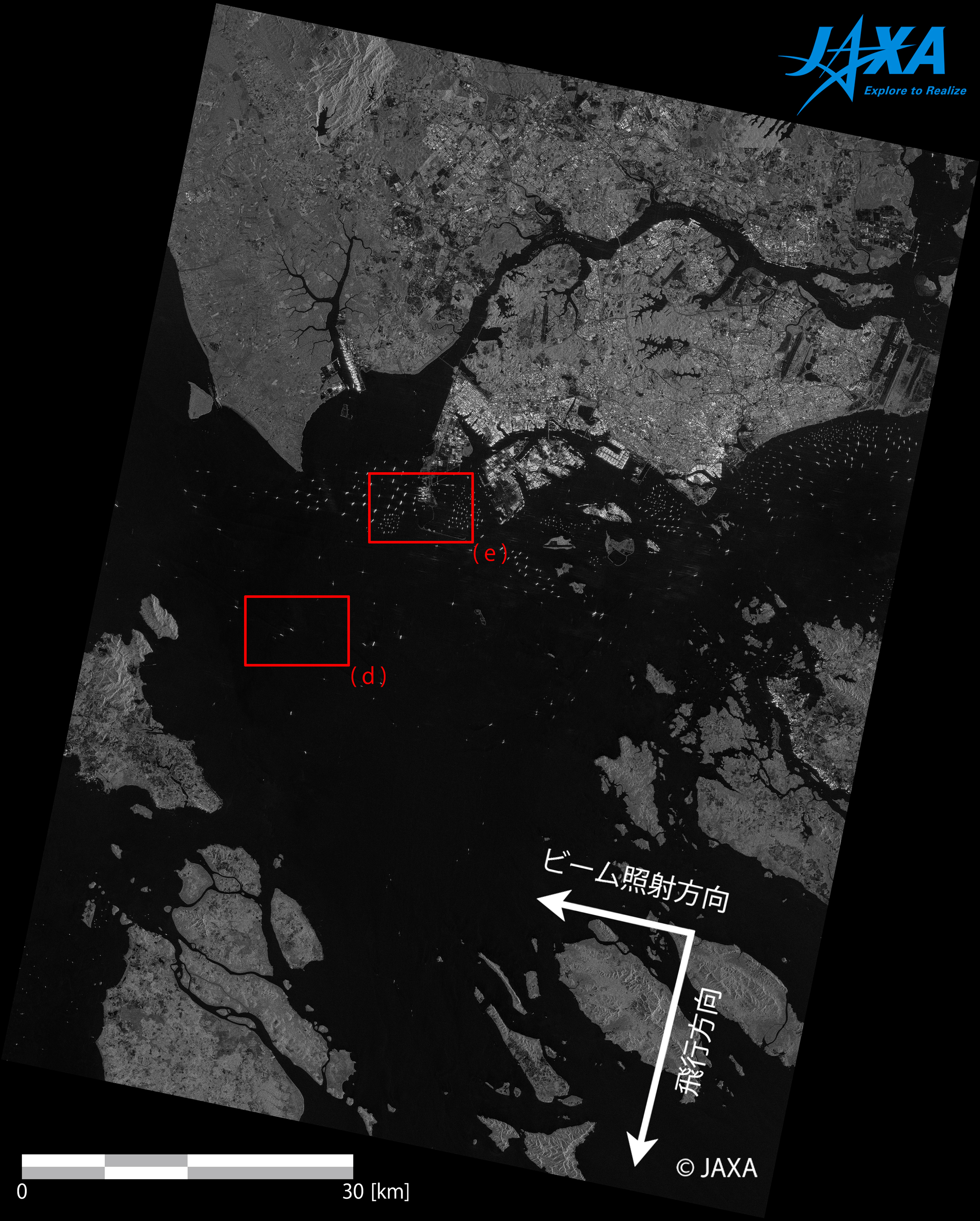
2. シンガポール海峡の観測結果
-
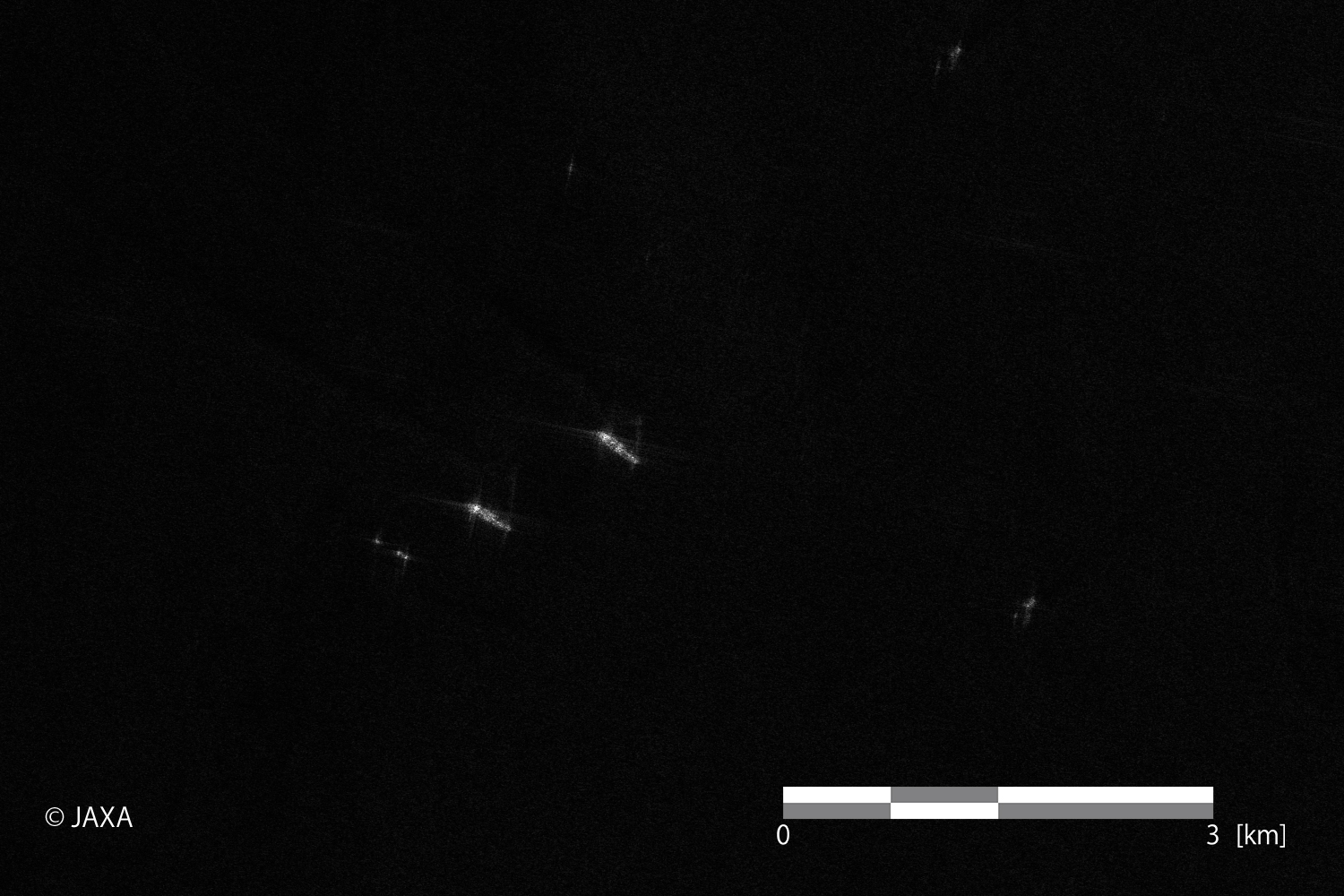 図6: 画像から確認できる船舶群(図5中の枠(d)の拡大図)(クリックで拡大画像へ)
図6: 画像から確認できる船舶群(図5中の枠(d)の拡大図)(クリックで拡大画像へ) -
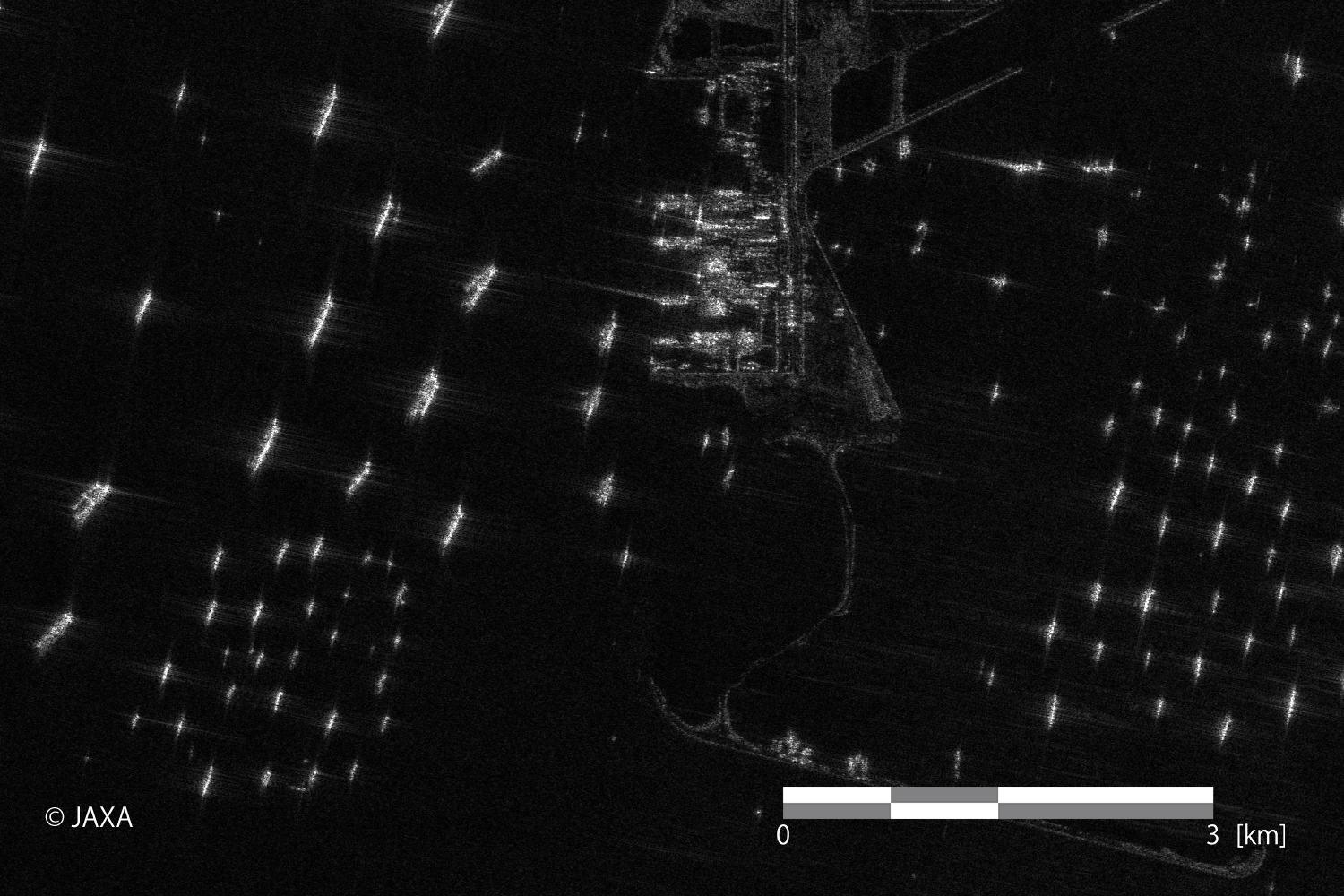 図6: 画像から確認できる船舶群(左から図5中の枠(e)の拡大図)(クリックで拡大画像へ)
図6: 画像から確認できる船舶群(左から図5中の枠(e)の拡大図)(クリックで拡大画像へ) -
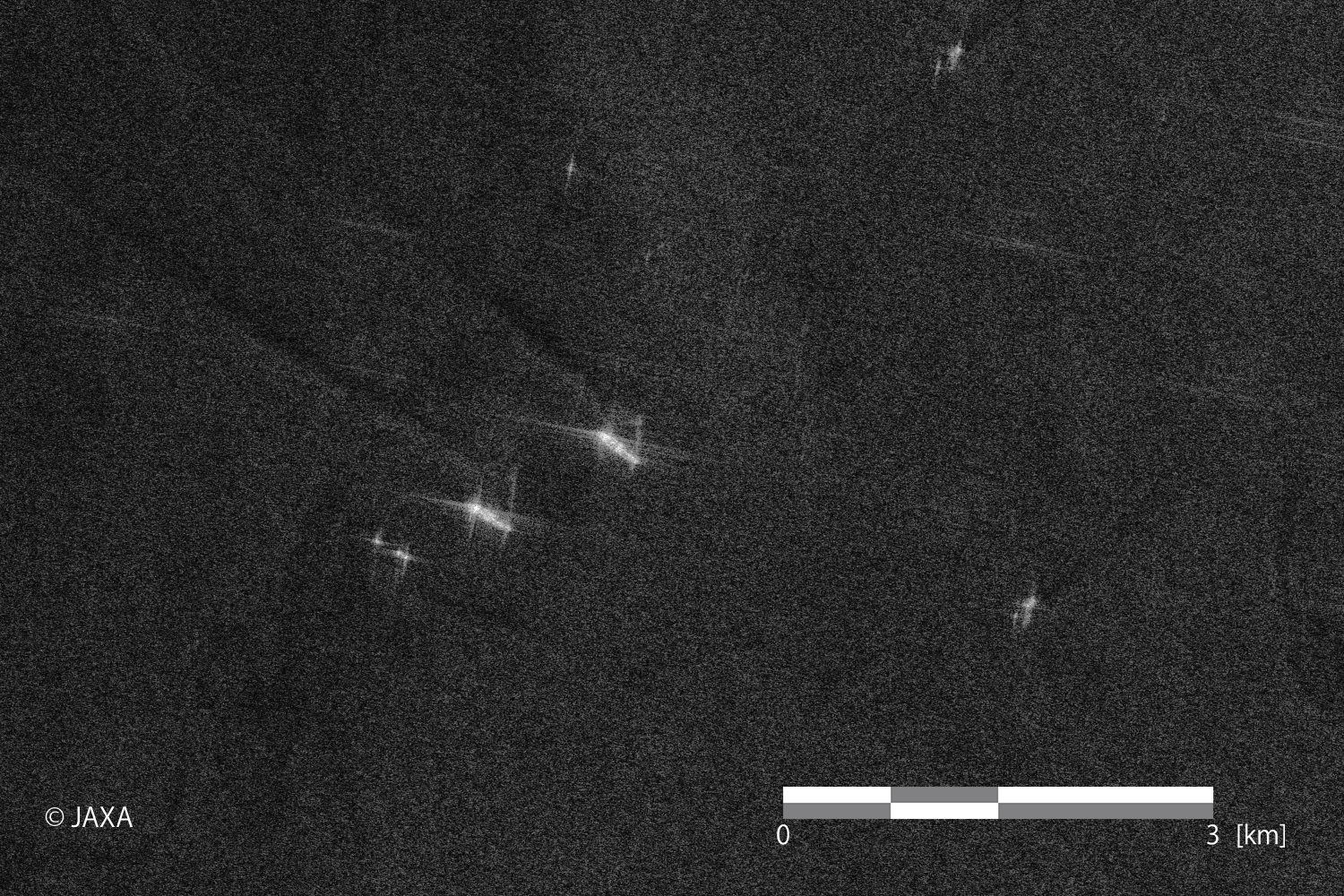 図7: 図5中の枠(d) をレベル補正した画像(クリックで拡大画像へ)
図7: 図5中の枠(d) をレベル補正した画像(クリックで拡大画像へ)
PALSAR-2の高分解能(10m)モードでは、高分解能(3m)モードよりも更に広い範囲を一度にとらえることができます。画像の横幅は約70km相当です。
マラッカ海峡を目前にしたシンガポール湾では、多くの船舶が常時停泊しており、PALSAR-2画像でもその様子がとらえられています(図6右図)。この画像では、図7から分かるように一部の船舶の航跡も観測画像上に表れています。レーダに近づく船舶は、航跡(海面上に現れる筋状のもの)から衛星進行方向にずれて画像上に現れます。この理由は、SARと船舶の相対運動によって生じる観測周波数(ドップラー周波数)が+にずれるからです。反対に、レーダから遠ざかる船舶は、航跡から衛星進行方向と逆にずれて現れます。3. 紀伊半島沖の観測結果
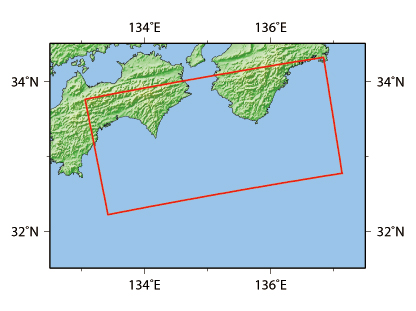
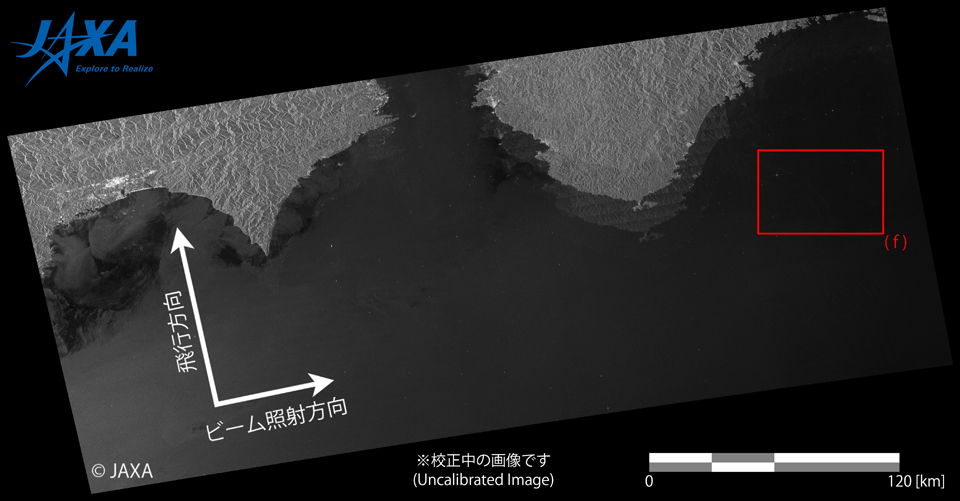
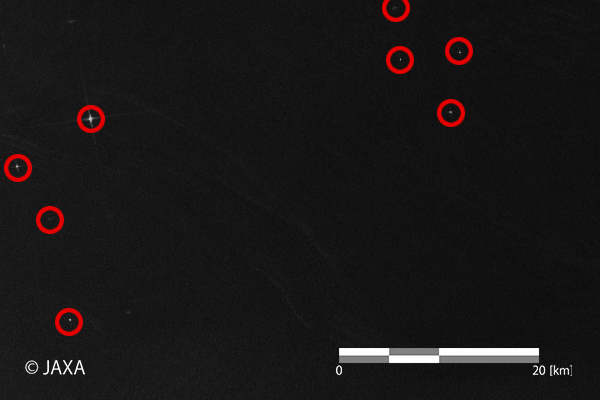
赤丸で囲まれた点は船舶と推定される。
4. 船舶自動検出結果
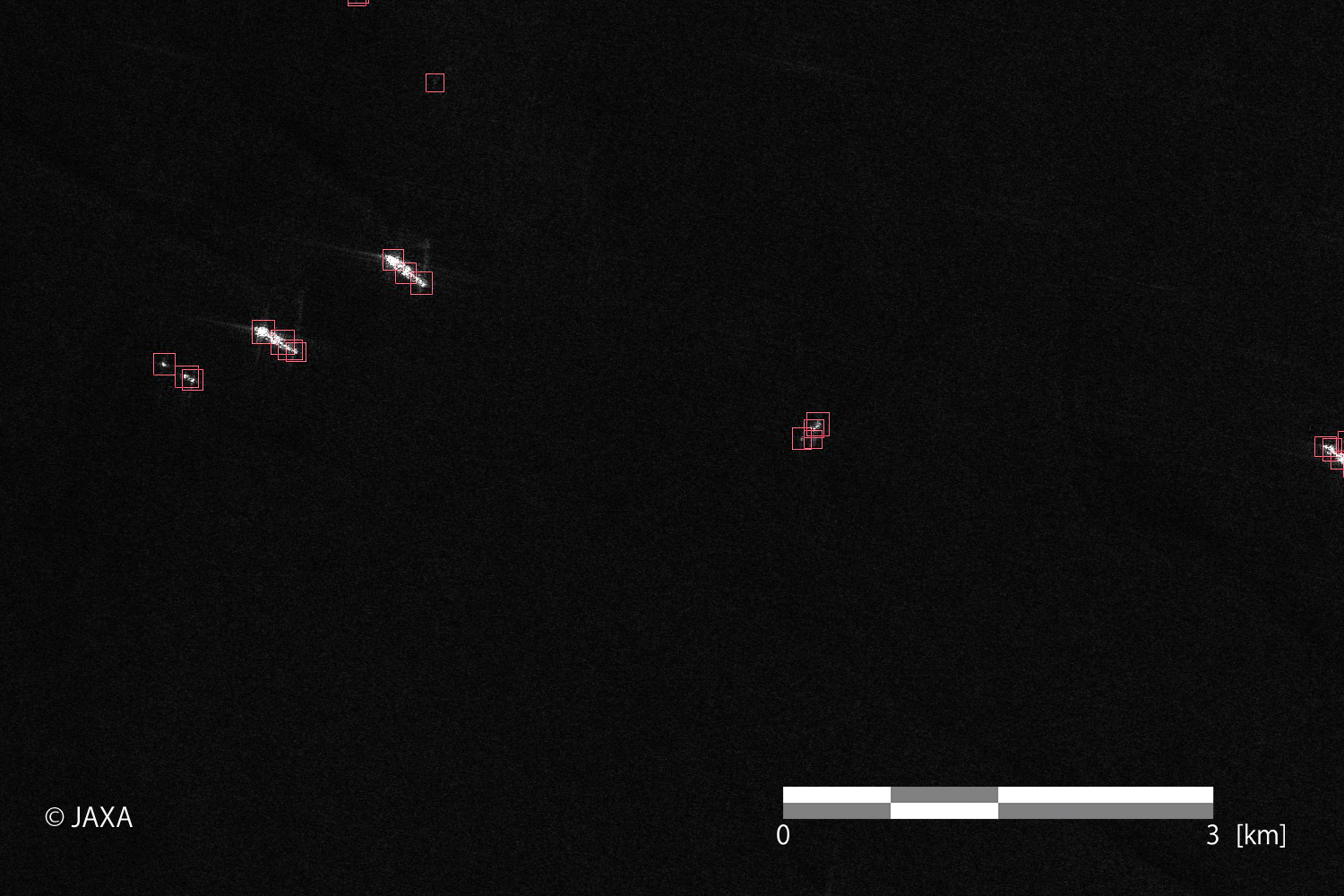
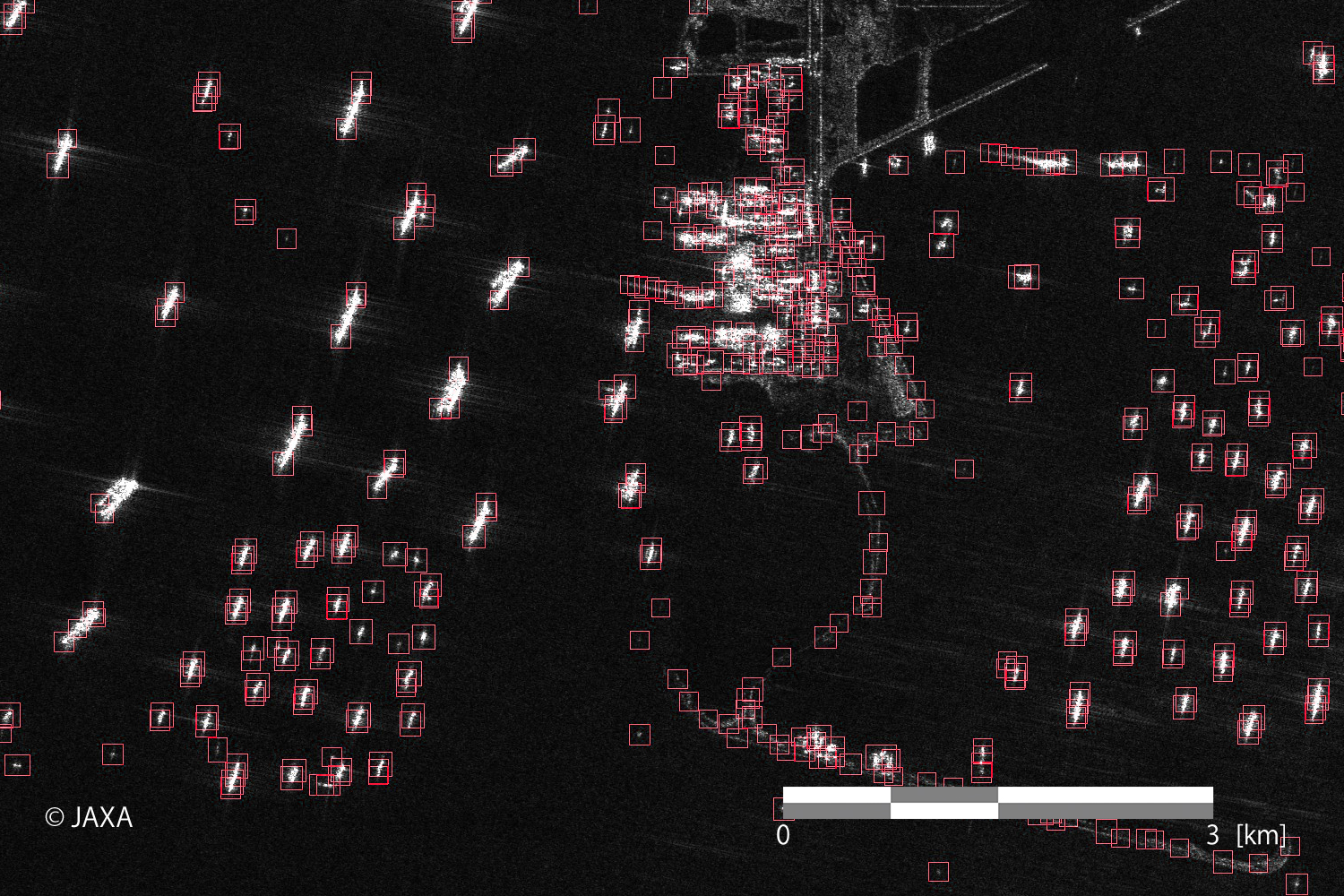
以上ご紹介しましたように、PALSAR-2は天候・昼夜を問わず広域・詳細に船舶を観測することができます。また、観測モードごとの特徴を使い分けることで、多種多様な船舶観測の要求を満たすことが今後も期待されます。
PALSAR-2画像の海洋面へのさらなる応用として、画像からの船舶検出結果とAIS※2データを組み合わせることによる、AIS未設置船舶の検出や船舶のトラッキング等が挙げられます。
※2:AIS(Automatic Identification System:自動船舶識別装置)は、船舶の位置情報等を発信する装置です。国内の多くの船では設置が義務付けられています。ただし、海外ではまだ設置が普及していない場合もあります。