地球が見える 2005年
飛行船から見た大樹町の風景
昨年(2004年)7月〜11月に北海道の大樹町において行われた成層圏プラットフォーム定点滞空飛行試験(*1)の中で、2回の地球観測ミッション試験(*2)が行われ、飛行船に搭載した 3種類の観測センサを用いて、植生観測や交通観測等の実験に成功しました。
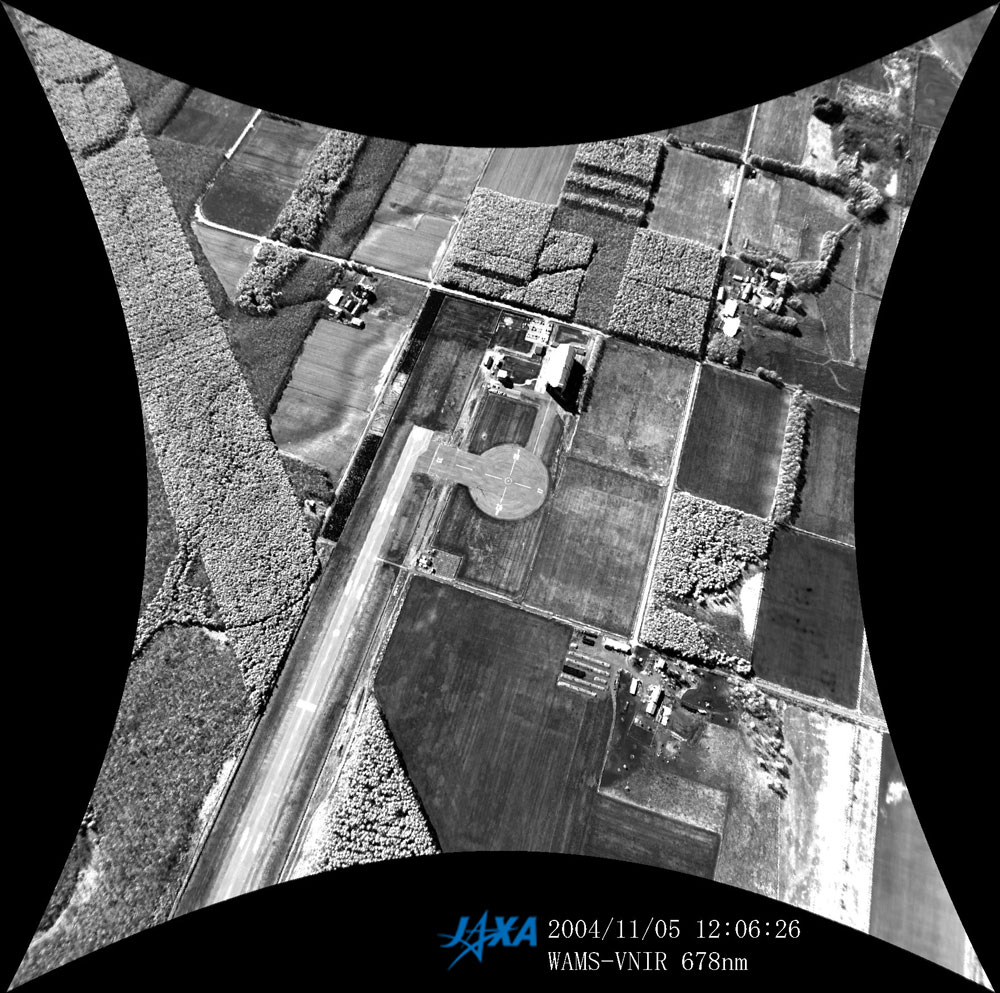
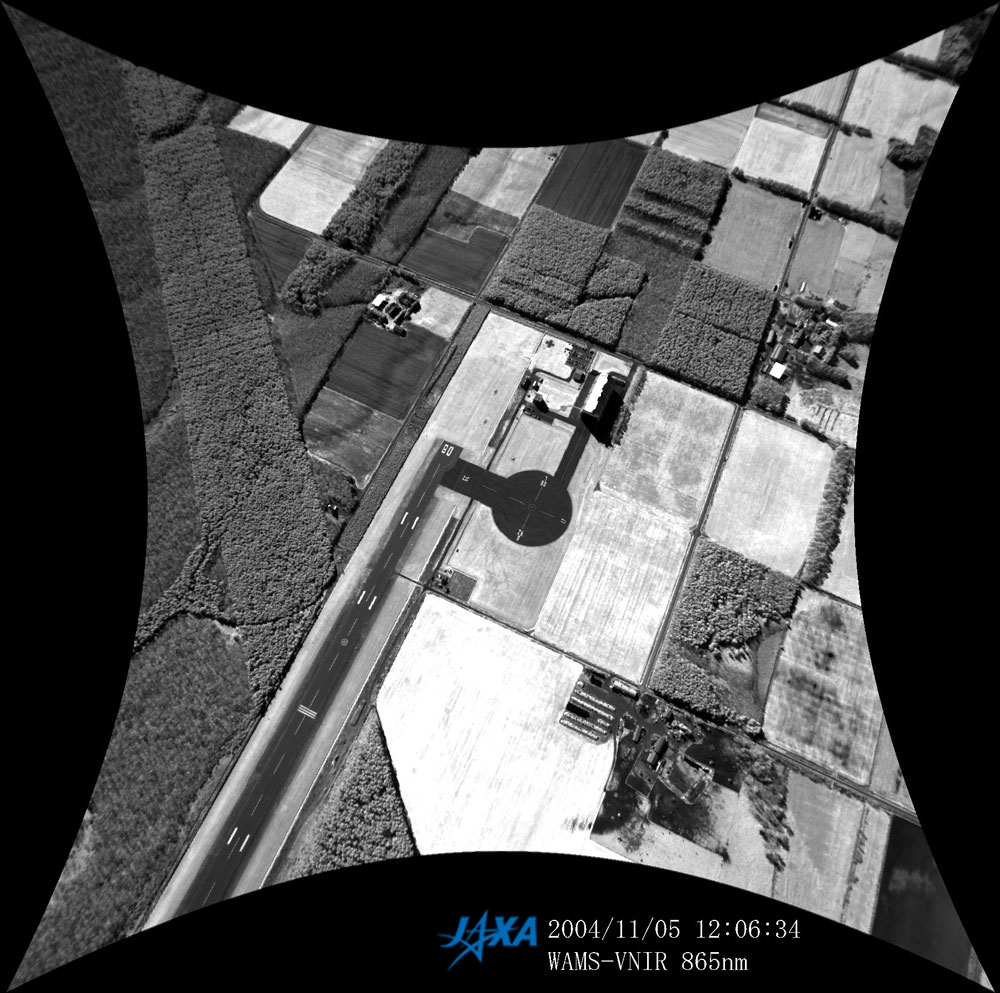
図1は、定点滞空飛行試験機(飛行船)に搭載した広画角マルチバンドセンサ(可視・近赤外) により、約850m上空から撮影した成層圏プラットフォーム大樹実験場周辺の画像です。広画角マルチバンドセンサ(可視・近赤外)では、赤い波長(678nm)の光や、人間の目には見えない近赤外と呼ばれる波長(865nm)の光を選択して見ることができます。(a)と(b)の画像を比較すると、植生が活発なところでは近赤外が相対的に明るく見える特性があり、このような分光特性を利用した解析によって実験場周辺の植生状況を知ることが出来ます。
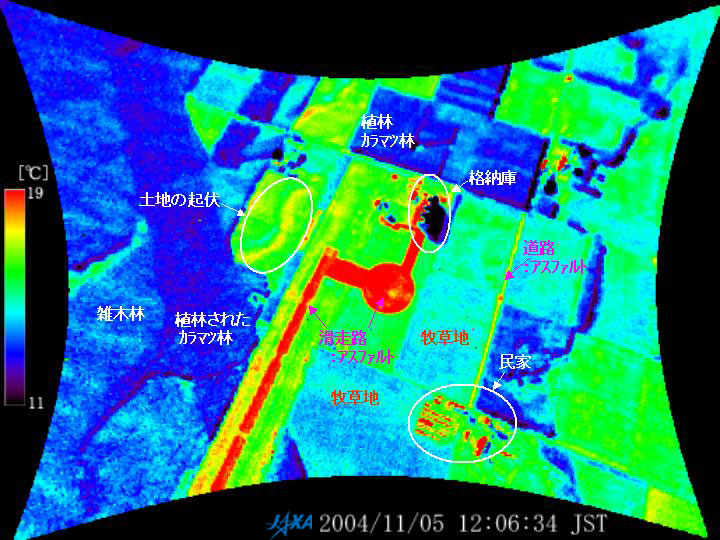
図2は、図1と同じく高度850mから実験場周辺を撮影した広画角マルチバンドセンサ(熱赤外)の画像です。一般に、どのような物体でも目に見えない赤外線を放射していて、その強さは物体の温度が高いほど大きいという関係があります。広画角マルチバンドセンサ(熱赤外)により物体から出る赤外線の強さを測ることにより、地表面の温度の分布を知ることが出来ます。 図では、温度が高い部分に赤色〜黄色を、温度が低い部分に紫色〜青色を配色しました。日中に観測した画像であるため、日射により暖められやすい道路や滑走路などのアスファルトの領域は、高い温度を示しています。植生に覆われた地表面においても、樹高高度が高い林は温度が低いのに対し、牧草地は比較的温度が高いなど、土地被覆により地表面温度に差があることなどが分かります。また、建物や土地の起伏についても明確に識別できます。なお、図1及び図2の補正前の原画像は、魚眼レンズで撮影した写真のように大きく歪んだもので、歪補正を行うと画像の四隅が外側に引っ張られたように伸びたものとなります。これはセンサの視野角を広くするために画像の歪が大きくなることを許容したためです。
図3は、大樹町浜大樹集落上空から数10cmの分解能で撮影した高分解能センサによる撮影画像です。今回の観測実験で撮影した動画中には図3のような右左折の他に、追い越しや停止、転回などをする車両が撮影されています。これらの車両をコンピュータ処理によって認識し、さらに追跡していくことで、車両ごとの走行パターンを把握することが可能です。将来的には、多くの車両の統計データを利用することで、道路交通状況の把握とその解消方法の検討に役立つことが期待されます。 成層圏プラットフォームを用いた地球観測は、従来から行われていた航空機観測、衛星観測等と比較して、特定地域を集中的に高分解能・高精度で観測することがが可能です。将来、成層圏プラットフォームが実現されれば、環境監視、農林漁業、交通等の産業面の応用や防災・災害時の状況把握など、様々な分野への貢献が期待されています。 (*1) 独立行政法人宇宙航空研究開発機構と独立行政法人情報通信研究機構との共同研究として実施されました。成層圏プラットフォーム計画は、人類の直面する課題に応え、新しい産業を生み出す大胆な技術革新に取り組む新しい千年期の事業として、平成11年10月の総理大臣決定による「ミレニアム・プロジェクト」に選定されています。 (*2) 10月5日 飛行特性データ取得試験 :到達高度600m 11月5日 中高度到達試験 :到達高度2000m
関連サイト: 〜大型無人飛行船の遠隔・自動操縦による定点滞空飛行及びミッション試験に成功〜 付録: 定点滞空試験機における地球観測ミッションの目的:
搭載の3センサ:
EOSS主要諸元:
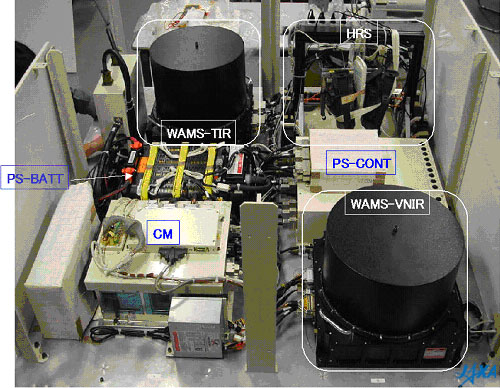
定点滞空試験機搭載用観測センサの外観:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||