ALOS-4
観測計画
基本観測シナリオ(Basic Observation Scenario: BOS)
注:上記の基本観測シナリオは、今後、運用シミュレーションの結果やユーザコメントを踏まえて、必要に応じて更新する予定です。運用に適用する確定版ではない点、ご留意ください。
基本観測シナリオに基づいた、衛星の昇交、降交軌道の回帰毎の基本観測モードを表に示します。(World / Japan)。
- PALSAR-3基本観測モード表 (World)
- PALSAR-3基本観測モード表 (Japan)
- PALSAR-3テーマ別観測マップ
各テーマ別の観測マップはこちらでご確認ください。
PALSAR-3 PRF固定観測モード時のブラインドマップ
PALSAR-3PRF固定観測モードで画像内に発生するブラインド領域をKMLでブラインドマップとして公開。
*PRF固定パターン1のUWD02にパターン2のKMLが格納されていたため修正しました。(2026/1/29)*PRF固定パターン1のUWD02RにUBDのkmlが格納されていたため修正しました。(2026/2/9)
*PRF固定観測モードXBD01、XBD03のブラインドマップを追加しました。(2026/2/20)
*赤道周辺において全球のブラインドマップが欠損していたため修正しました。(2026/7/23)
PRF固定観測モードの詳細については、「校正・検証」を参照ください。
| エリア | 観測モード | ビーム番号 | 分解能/観測幅 | ゾーン帯 | 衛星進行方向 | 観測方向 | KMLファイル | |||
|---|---|---|---|---|---|---|---|---|---|---|
| PRF設定パターン1 | PRF設定パターン2 | |||||||||
| 日本 | UWD | 01-03 | 3m/200km | ZONE2 | 降交/昇交 | 左/右 | パス(2.7MB) | エリア(2.7MB) | パス(2.3MB) | エリア(2.3MB) |
| UBD | 01-05 | 3m/100km | パス(2.2MB) | エリア(2.0MB) | パス(2.0MB) | エリア(1.9MB) | ||||
| 15-23 | パス(3.9MB) | エリア(3.6MB) | パス(4.2MB) | エリア(4.0MB) | ||||||
| 全球 | UWD | 01 | 3m/200km | ZONE1-5 | 降交/昇交 | 右 | パス(150MB) | - | パス(141MB) | - |
| HBQ | 06 | 6m/100km | パス(78.0MB) | - | パス(83.4MB) | - | ||||
| 08 | パス(82.5MB) | - | パス(85.1MB) | - | ||||||
| FWD | 01 | 10m/200km | パス(102MB) | - | パス(111MB) | - | ||||
| 02 | パス(129MB) | - | パス(131MB) | - | ||||||
| 03 | パス(145MB) | - | パス(134MB) | - | ||||||
| XBD | 01 | 25m/700km | パス(241MB) | - | パス(262MB) | - | ||||
| 02 | パス(252MB) | - | パス(276MB) | - | ||||||
| 03 | パス(302MB) | - | パス(329MB) | - | ||||||
*パス:衛星の軌道番号(パス番号)ごとに分割されたKMLファイル
*エリア:日本域の観測パスすべてを含むKMLファイル
【注意事項】
【ディレクトリ構造】
ディレクトリ構造と例は以下に示す。
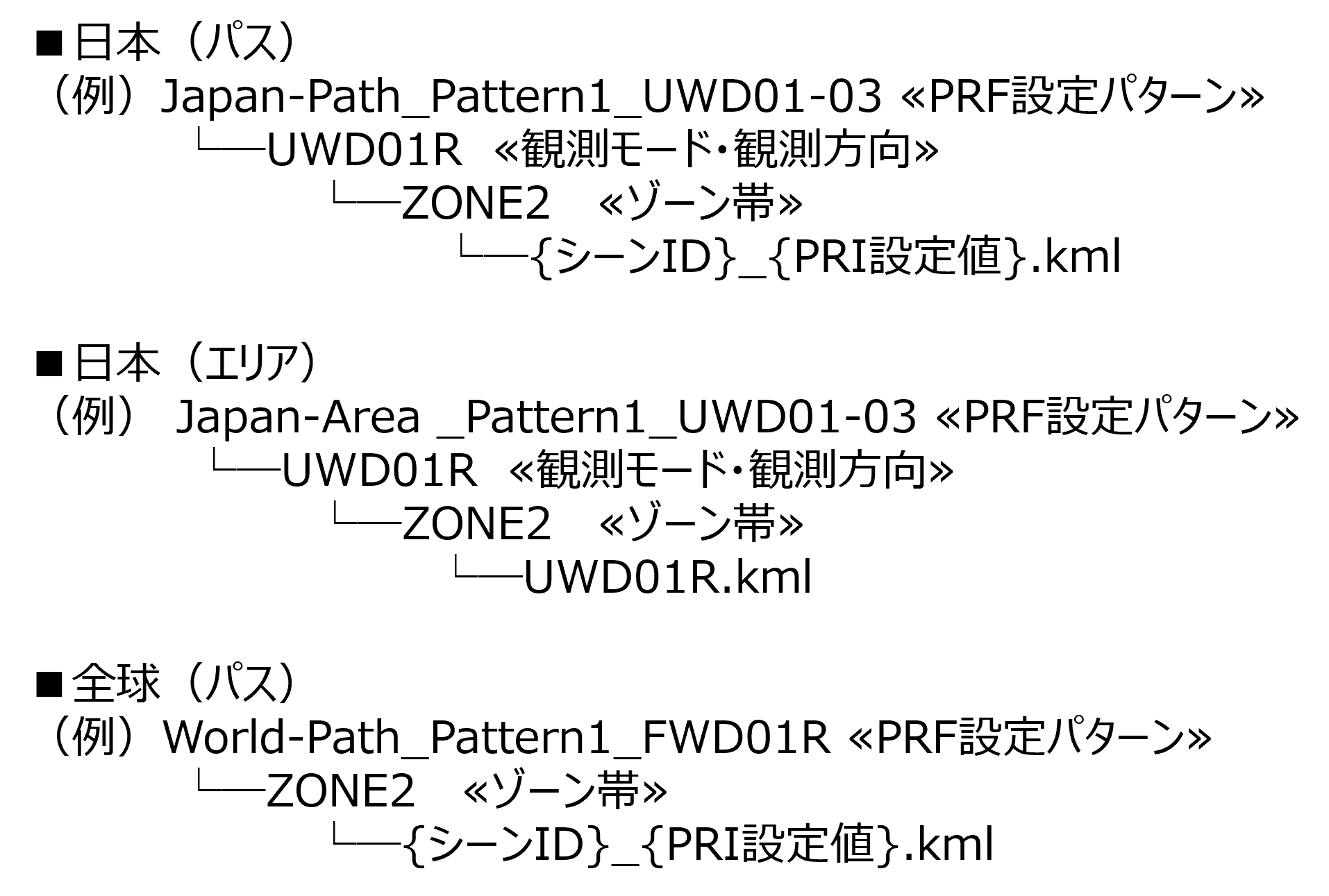

図 ブラインドマップのゾーン帯区分

図 PALSAR-3(UWD01モード)ブラインドマップの例
(左図:PRI設定パターン1、右図:PRI設定パターン2、
凡例:□サブビーム範囲を示す枠、□ブラインド領域を示す枠)
観測パス・フレームのシェープファイル
PALSAR-3の基本観測シナリオ(日本および世界、陸域のみ)で用いられる各モードについて、観測パス・フレームのシェープファイルを提供します。各パス・フレームの観測範囲を調べる際にご活用ください。
本シェープファイルと、観測シミュレーション結果として公開しているKMLでは、算出方法の違いにより、描画される範囲に若干のずれが生じる場合がありますのでご了承ください。
昇交軌道(Ascending)Zip圧縮ファイル、22.6MB ビーム区分:UWD01R、UWD01L、UWD02R、UWD02L、UWD03R、UWD03L、XBD02R、XBD02L、FWD01R
 UWD01R_A
UWD01R_A XBD02R_A
XBD02R_A FWD01R_A
FWD01R_A
| Sensor mode | Sensor Code [Beam No] | Polarization | Off-nadir angle | Pass designation | Beam direction |
|---|---|---|---|---|---|
| Stripmap10m 200km swath. | FWD [FWD01-FWD03] |
HH+HV | 3 Beam 28.2°- 44.3°, 41.9°- 48.2° |
Both (Ascending, Descending) |
Right |
| Stripmap6m 100km swath. | HBQ [HBQ06, HBQ08] |
HH+HV+VH+VV | 2 Beam 29.1°- 32.4°, 35.5°- 38.2° |
Both (Ascending, Descending) |
Right |
| Stripmap3m 200km swath. | UWD [UWD01-UWD03] |
HH+HV | 3 Beam 29.1°- 48.0° |
Both (Ascending, Descending) |
Right/Left |
| ScanSAR 700km swath. | XBD [XBD02] |
HH+HV | 4 Scan 39.1° |
Both (Ascending, Descending) |
Right/Left |