TANSO-FTS 概要
TANSO-FTSには、光学ユニット、制御ユニット、電子ユニットの3つのユニットがあります。光学ユニットは、ポインティング機構部、モニタカメラ(CAM)、リレー光学系、TANSO-FTS機構部、検出器、アナログ信号プロセッサーにより構成されます。全ての光学部品は光学ベンチに取り付けられ、その温度は23 °Cに制御され、20~26 °Cの間に維持されます。光学ユニットには、TIR検出器用冷凍機、黒体、ILS校正用ダイオードレーザー、拡散板およびその駆動機構、迷光を最小限化するフード、および、アナログ電子機器が取り付けられています。制御ユニットは、TANSO-FTSコントローラー、ポインティング機構部コントローラー、検出器温度コントローラー、冷却器コントローラー電子機器から構成されます。電子ユニットには、ヒーター制御、データ処理、および、衛星バスシステムとのデータ・テレメトリ・コマンド転送インターフェースの機能があります。電子機器の全ての部品に冗長性があります。
TANSO-FTS緒元| FOV(視野) | IFOV(瞬間視野) 15.8ミリラジアン(直下視で地表10.5 km) 範囲(クロストラック ±35°、アロングトラック ±20°) |
|||
|---|---|---|---|---|
| 口径 | 68 mm | |||
| 速度 | 1.1、2、4秒/インタフェログラム | |||
| MOPD | ±2.5 cm(両側)(最大光路差) | |||
| バンド | 1P, 1S | 2P, 2S | 3P, 3S | 4 |
| 波長域(cm-1) | 12900-13200 | 5800-6400 | 4800-5200 | 700-1800 |
| 分光分解能(cm-1)(FWHM)(測定値P(S)) | 0.367(0.356) | 0.258(0.257) | 0.262(0.263) | 0.24 |
| 検出器 | Si | InGaAs | InGaAs | PC-MCT |
| SNR(打ち上げ前)(測定値) | >340 | >320 | >410 | >280 |
| 軌道上校正 | 太陽照度、 深宇宙、月(放射輝度)、ダイオードレーザー(装置関数) | 黒体、 深宇宙(放射輝度) | ||
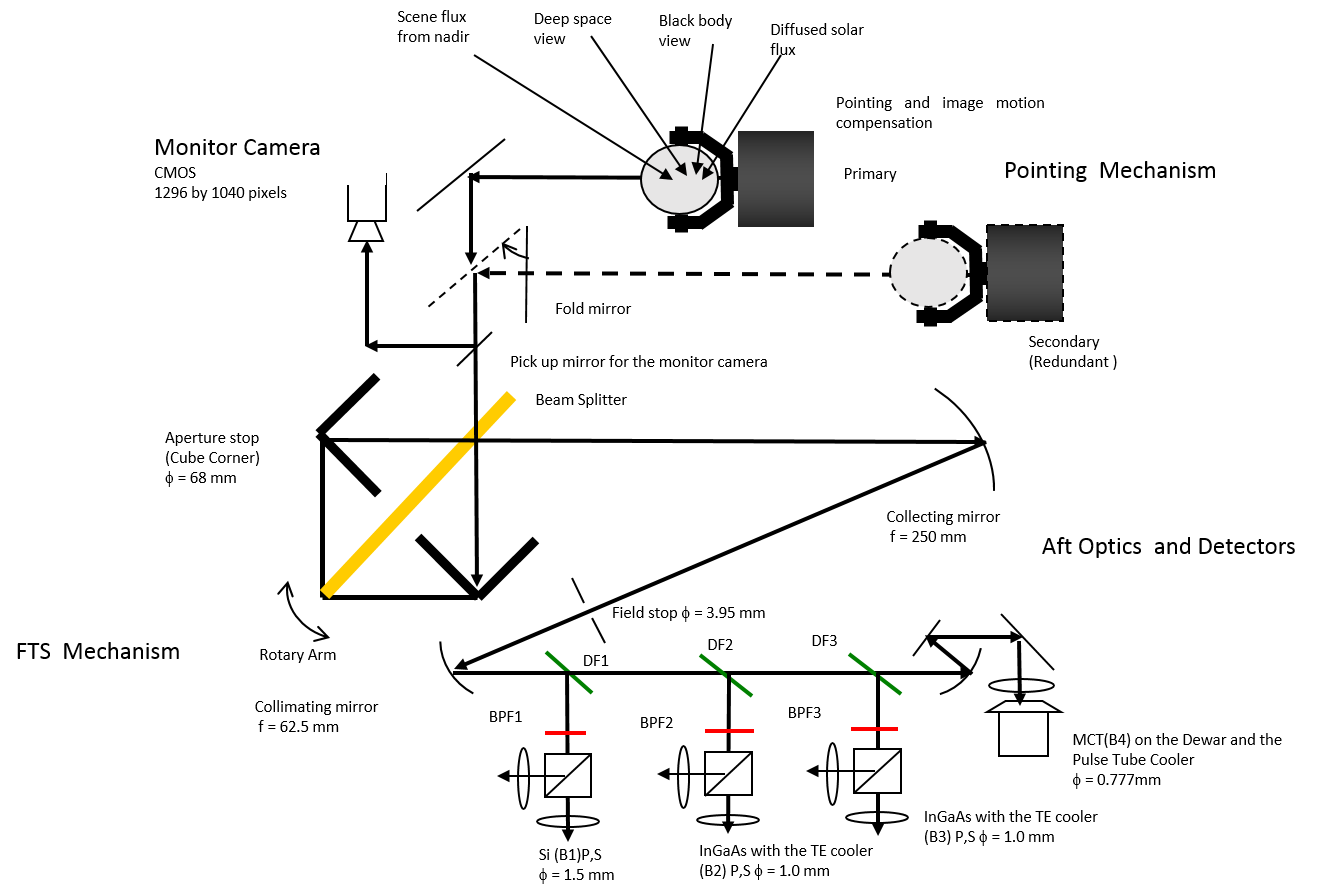
TANSO-FTS光学システムの配置図。2015年1月以降、観測光は従系ポインティング機構部から導入されています。
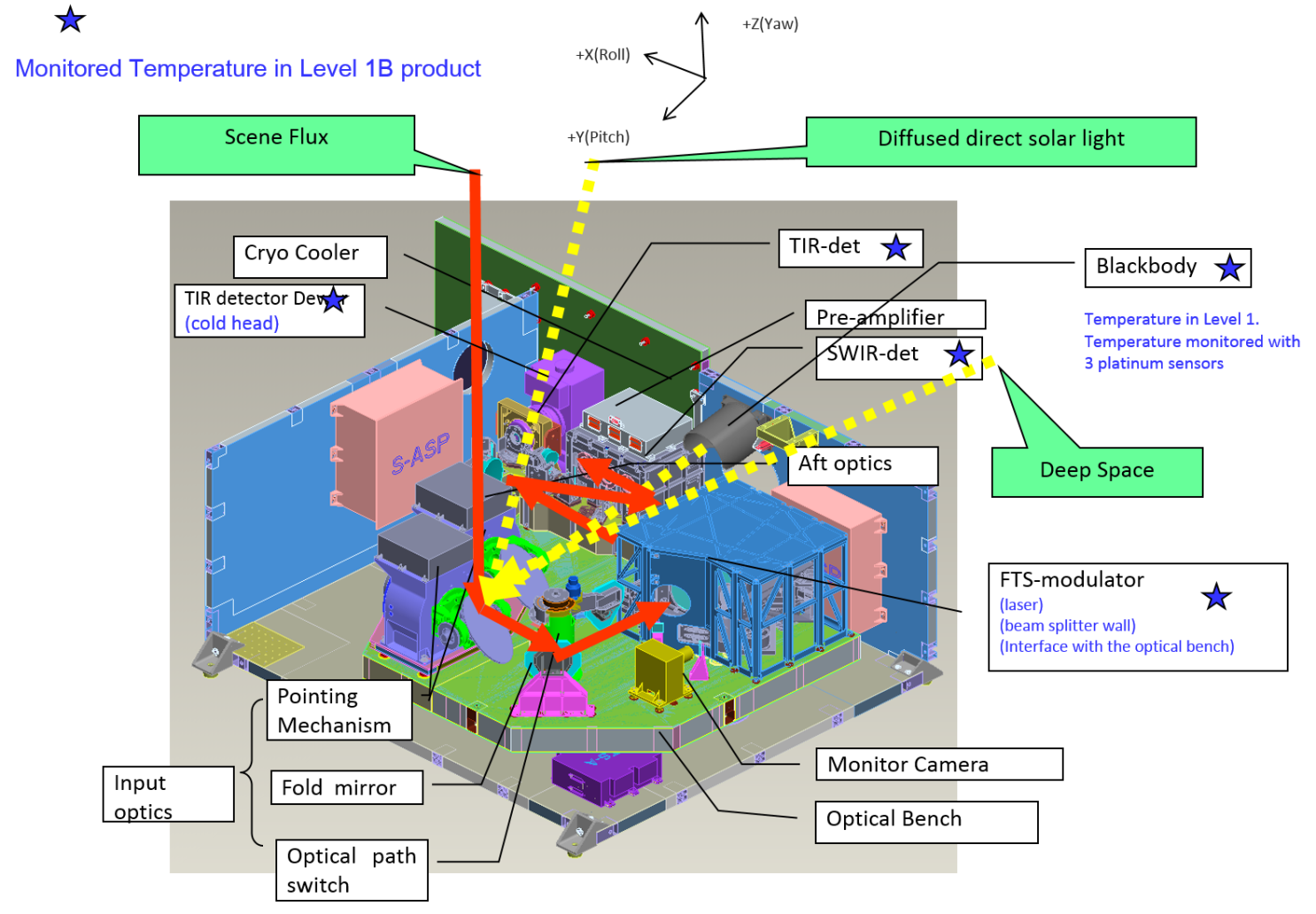
TANSO-FTS光学ユニット内の3D設計ビュー
TANSO-FTSセンサの観測原理
温室効果ガス(GHG)を監視するためには、温室効果が発生する対流圏を測定することが不可欠です。一般的に、宇宙から対流圏を測定することは、成層圏の測定よりも困難です。これは、雲やエアロソルによる散乱と、地表面の標高を考慮しなければならないためです。リム放射や太陽掩蔽などの周縁観測は、対流圏下部の測定には使用できません。下方視の測定が、対流圏下部を通過する光線を計測してGHGを測定する、実行可能な唯一の方法です。GOSATは、雲やエアロソルを計測するためのCAIと、GHGを測定するためのFTSを両方搭載しています。
TANSO-FTSは、地表面で反射される太陽の光短波長赤外(SWIR)域の分光放射輝度を測定します。CO2のカラム濃度は、温度依存性の低い1.6 µm域の吸収線から主に導出されます。2.0 µm 域も、CO2導出に使用することができます。さらに、CH4は1.6 µm域で導出されます。0.76 µmの酸素(O2)Aバンド吸収は、カラム濃度導出の鍵となるパラメーターである実効光路長の推定に使用されます。O2濃度は、よく知られるように不変であり、大気全体に均一に分布しているので、基準として使用することができます。また、地表や大気から放射される熱赤外(TIR)域の分光放射輝度もGOSATは測定しており、様々な光吸収断面積から、鉛直プロファイルを導出することができます。
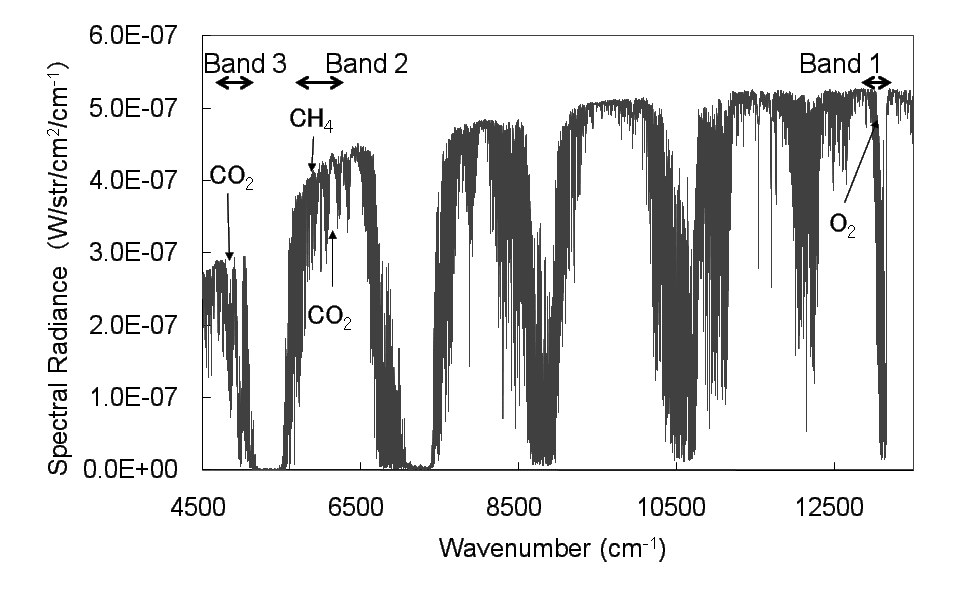
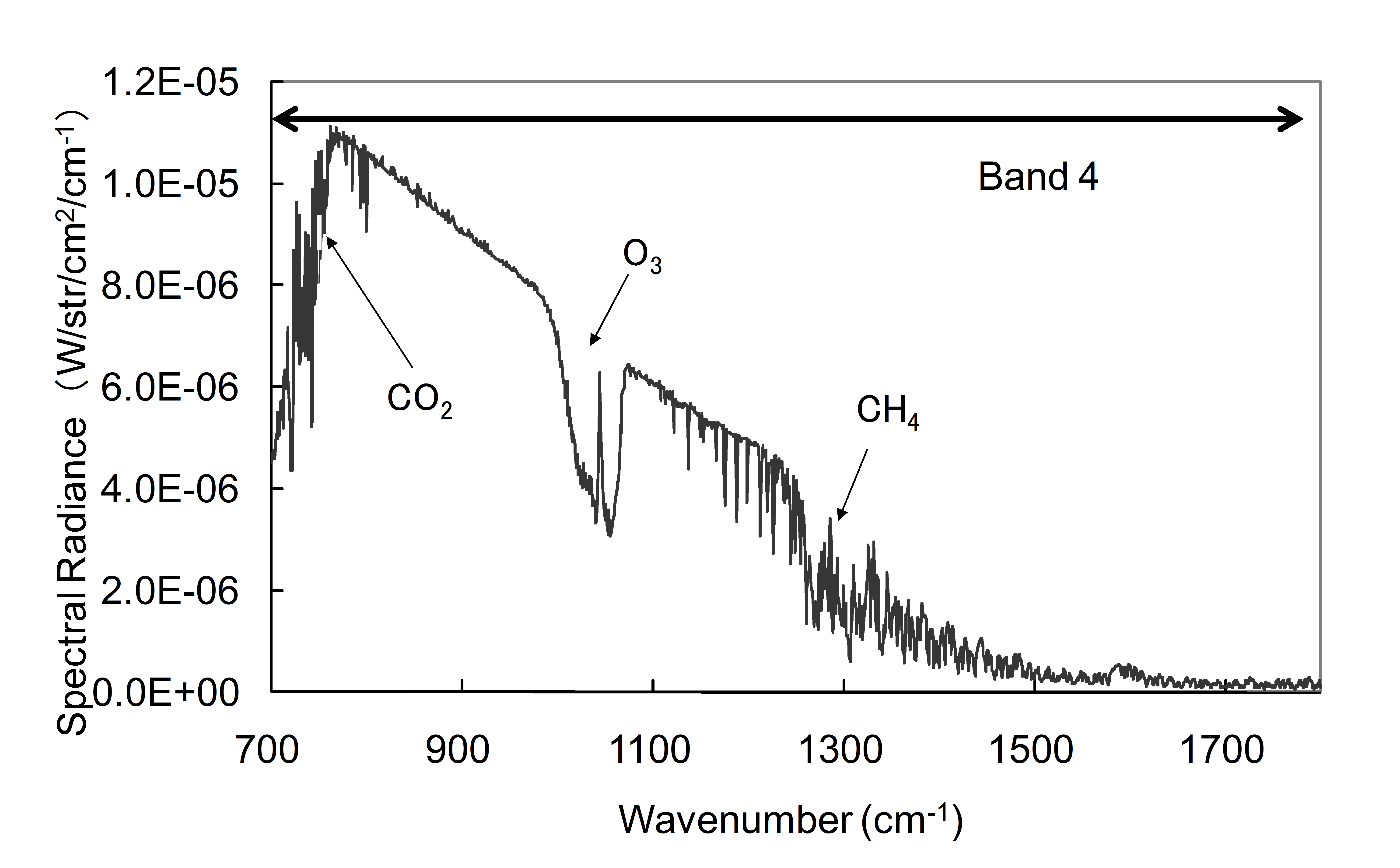
シミュレーションされたTANSO-FTSの波長範囲:(a) SWIR(バンド1、2、3)および(b) TIR(バンド4)
フーリエ変換分光計(FTS)機構
FTS機構部は、2個のコーナーキューブ反射鏡を備えた、複振り子型干渉計で、機械的動作の4倍に当たる±2.5 cmの光路差(OPD)を生成します。2個のコーナーキューブ反射鏡は、ロータリーアームの先端に取り付けられています。これらは、最小の光学的ずれで変調効率を恒久的に最大化するために、相互に精密に位置合わせされています。アームは、板バネによりビームスプリッターホルダーに取り付けられ、回転モーターにより動作します。2個のコーナーキューブ反射鏡とモーターは、3軸全てについて静的に釣り合っており、耐振動性が高くなっています。ロータリーアーム機構は1%より良い速度安定性で滑らかに動作し、均一な周波数の出力変調信号を生成します。高いSNRを得るためには、サンプリングの電気的帯域幅は充分に小さいことが必要です。すなわち、スキャン速度が十分に低くなければなりません。要求されるSNRを達成するには少なくとも4秒が必要であり、片道のインタフェログラム取得の公称時間は4秒に設定されています。TANSO-FTSは、2基の1.31 µm分布帰還型(DFB)レーザーと、2基のInGaAs検出器を使用する、完全な冗長構成のサンプリングシステムを備えています。それぞれのダイオードレーザーには、従来使用されたHeNeレーザーより大幅に長い寿命があり、冗長化する上で十分に小型です。ダイオードレーザーの波長には温度依存性があるため、熱電コントローラーにより 25.000±0.001 °Cの安定した温度に適正に制御されます。このため、波長安定性(Δλ/λ)は10-7より大幅に高く、通常のHeNeレーザーの安定性に匹敵します。
後部光学系および検出器
FTS機構部からの変調された光は、円形絞りに集められます。この共通の視野絞りを共用することで、TANSO-FTSの7つの波長帯域の幾何学的位置が合います。これにより、直下視の10.5 kmの観測領域に相当する15.8 mradのIFOVが定義されます。光学的なスループットを最大化するため、IFOVは、最も重要なバンド2の0.2 cm-1の分光分解能(間隔)に許容される最大干渉に対応させています。観測光はコリメートされ、ダイクロイックフィルタを使用して4つの波長帯域に分離されます。3つのダイクロイックフィルタは、最も波長が短い帯域の光を反射し、より長い波長帯域の光を透過します。これらのフィルタは、SWIR帯域の偏光感度を最小にし、また、TIRの背景輻射を最小とするように慎重に設計されています。それぞれのSWIR帯域の光は狭帯域パスフィルタを通り、偏光ビームスプリッターにより2つの検出器に分けられます。狭帯域パスフィルタは、チャネリングを回避するためくさび型になっており、短波長光を排除してエイリアシングを回避し、帯域外の迷光を最小化します。
2個のSi検出器が、1Pと1Sのバンドに適用されます。2P、Sおよび3P、Sバンド用の4個のInGaAs検出器は、バイアスなしで、暗電流を最小化するため3段熱電冷却器により-40 °C に冷却されます。TIR光は、デュワーに取り付けられパルス管冷却器で70 Kに冷却される1個の光伝導性(PC)HgCdTe(MCT)検出器に集められます。パルス管冷却器は振動が非常に小さく、インタフェログラムの取得に影響を与えません。また、軌道上の予期しない振動干渉を最小化するため可変周波数のモーターを備えています。
信号処理とデータ転送
それぞれの検出器信号電流は、電圧に変換され、オペアンプによって増幅されます。高周波ノイズを最小限とするため、ローパスフィルタ付き多段アンプが統合されています。アナログ信号は、検出器毎に1個の16ビットADコンバーターによって、並行してデジタルデータに変換されます。したがって、7つのインタフェログラムは同時に取得されます。バンド1、2、3では、レーザーフリンジの上下のゼロ交差がサンプリングのトリガーに使用され、インタフェログラム毎にレーザー波長の半分(λ/2)の間隔を持つ76,336のサンプリング点が得られます。バンド4では、インタフェログラム毎に、λの間隔をもつ38,168のポイントがサンプリングされます。バンド1では、ノイズのエイリアシングを回避するために、変調成分(AC)のみが取得されます。バンド2および3では、ACに加えて、オフセットデータ(DC)も取得されます。バンド4では、変調成分(AC)と非変調成分(DC)の両方が取得され、別々に増幅されます。DC成分は、PC-MCT検出器の非線形性の影響を補正するために使用されます。デジタル信号は電子ユニットで処理されます。さらに、レベル1および2の処理に使用されるテレメトリデータが、データヘッダーに付加されます。テレメトリデータには、衛星位置、GPS時刻、アンプゲイン、ポインティング機構部のATおよびCT角、および、黒体と検出器の温度が含まれます。最後に、取得されたデータは、宇宙データシステム諮問委員会(CCSDS)フォーマットでGOSAT衛星バスシステムのMDPに転送されます。
ポインティングシステム
TANSO-FTSの2軸ポインティング機構部には、クロストラック(CT)およびアロングトラック(AT)方向のポインティング機能があり、地球および校正ソースを正確に指向することが可能です。主にCTステッパーモーターを回転させることによって、ポインティング機構部は地表面、深宇宙、黒体、拡散板を捉えます。3日間の回帰周期の間に、地表面の観測点に指向するために、走査角は直下から±35 °の範囲をカバーします。主にATモーターを回転させることにより、ターンアラウンドの間の通常4秒の片道インタフェログラム取得時間の衛星の動きを補償して、TANSO-FTSは同じ領域を指向することができます(イメージモーションコンペンセーション、IMC)。ポインティング機構部の動作は、FTS機構部と同期しています。ATおよびCTモーターはどちらも、FTS機構部の0.4秒から0.6秒の間のロータリーアームのターンアラウンド内で作動・静定します。通常観測モードでは、ポインティングミラーは、直下に近い、事前定義された地球上のグリッドポイントを指向します。地表面反射率が小さい海洋上では、ポインティング機構部は、鏡面反射が発生して反射率の大きい、大きく広がったサングリント域を指向します(サングリント観測モード)。AT指向角の範囲は±20 °であるため、サングリント観測は低緯度および中緯度に限定されます。主系ポインティングシステムは、2015年1月26日に従系ポインティングシステムに切り替えられました。そのため、2015年1月以降に取得されたTANSO-FTSレベル1データは、従系ポインティングシステムによるものです。
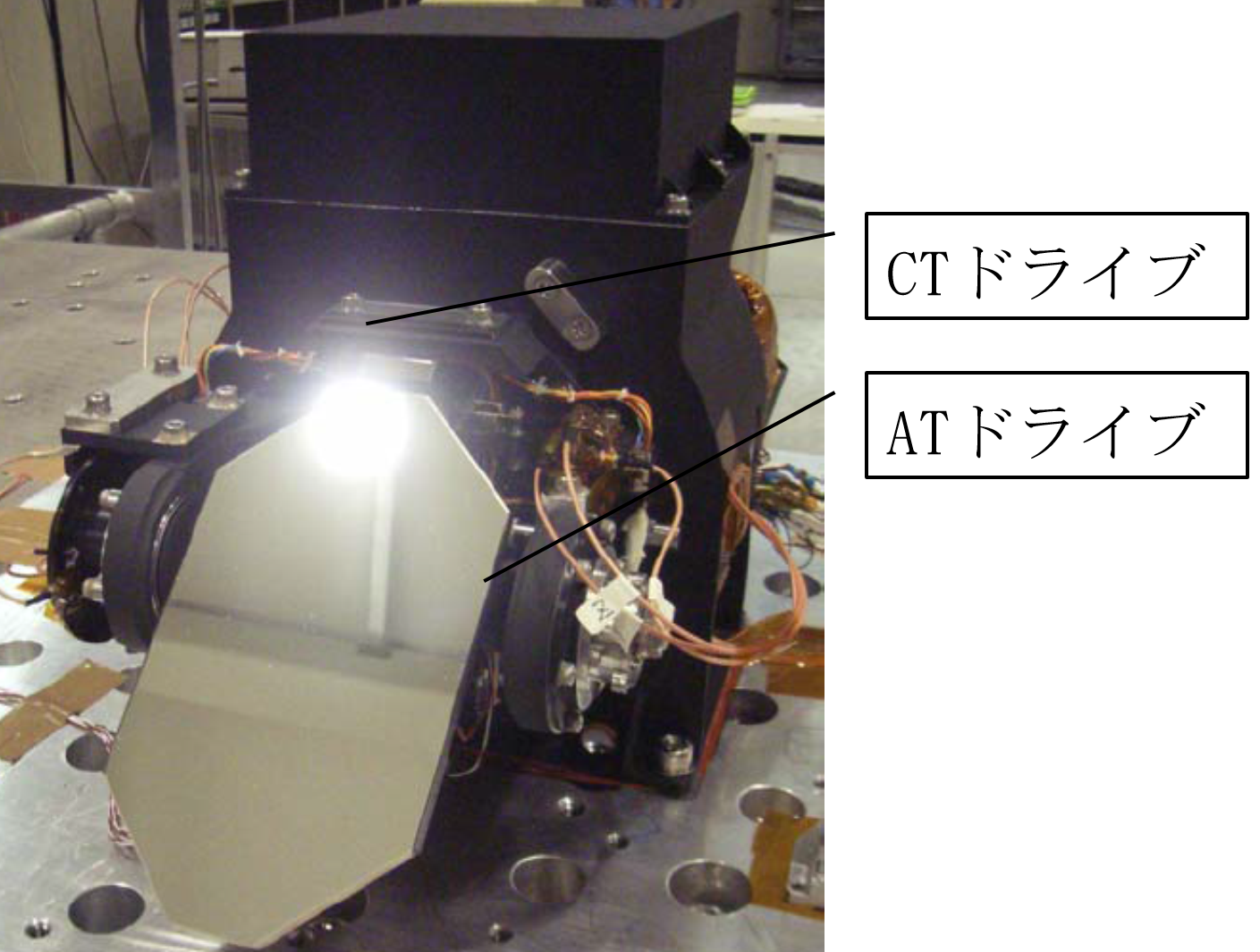
TANSO-FTSの2軸ポインティング機構部の写真
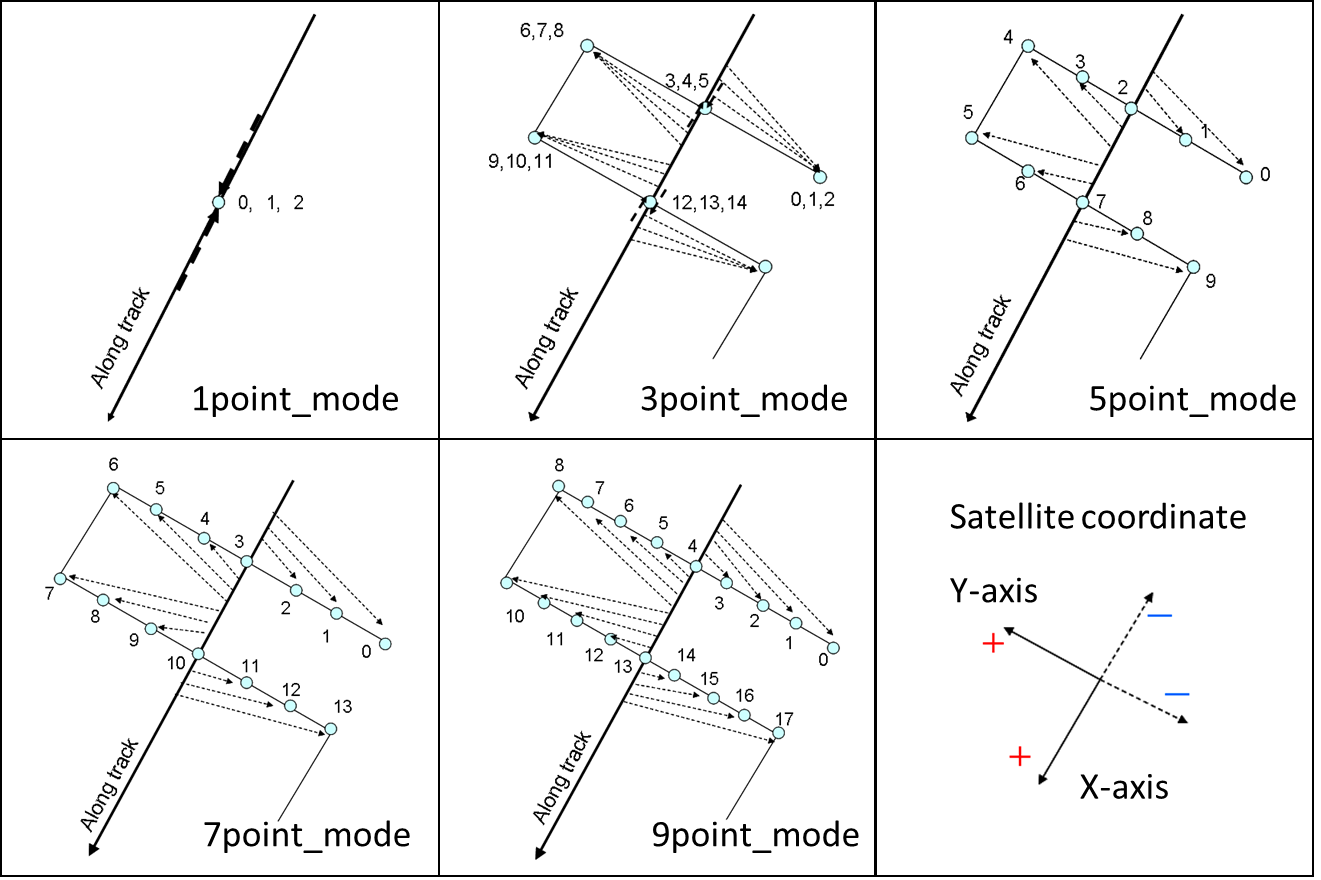
TANSO-FTSグリッド観測パターン
5点モードに置き換えて
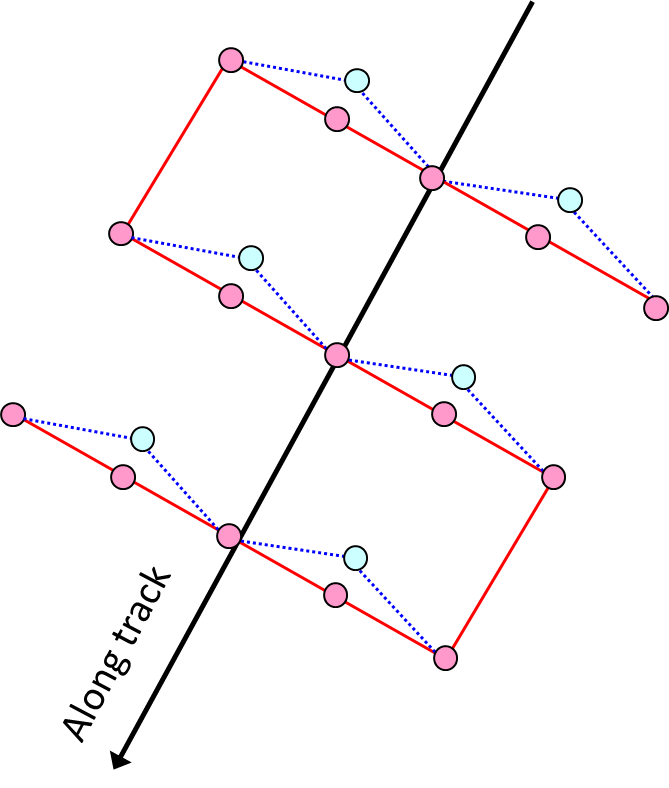
2009年6月26日から2010年7月31日まで使用されたM型グリッド
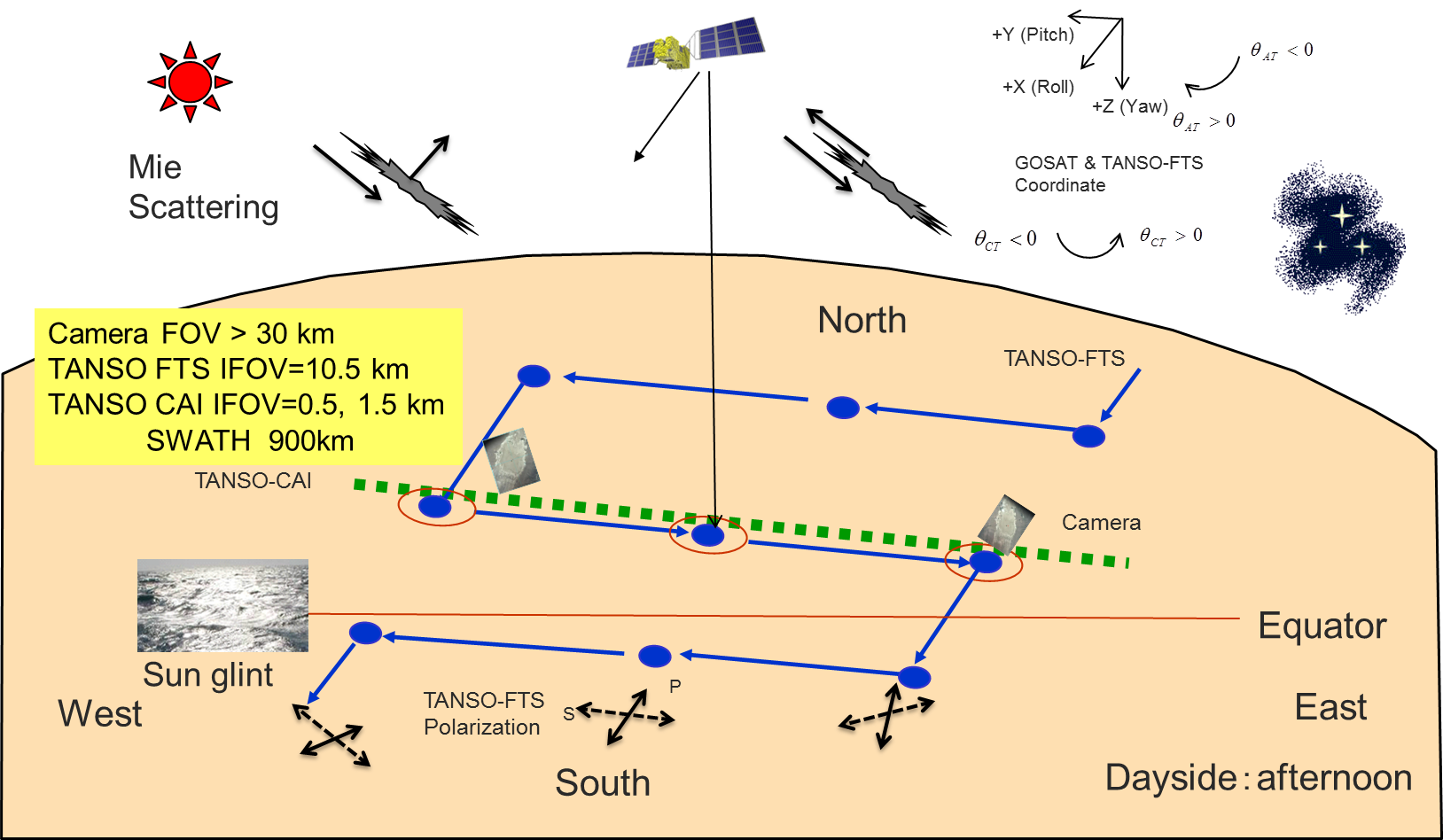
TANSO-FTSの観測ジオメトリとモニタカメラ(3点モード)、およびTANSO-CAI。

モニタカメラ(CAM)
TANSO-FTSの瞬間視野(IFOV)位置を記録するため、小型の2次元CMOSカメラが搭載されています。打ち上げ前にモニタカメラを光学ベンチ上に慎重に位置決めして堅固に取り付けたことによって、打ち上げ前後におけるTANSO-FTSのIFOV中心とモニタカメラの間の位置対応は安定しており、これはGOSATのミッションを通して維持されています。軌道上のTANSO-CAIとモニタカメラの画像を比較することにより、TANSO-CAIとTANSO-FTSの間の位置対応を推定することができます。この位置対応は、250 mの精度で推定する必要があります。この位置対応の推定は、地上基準点(GCP)を指向することによって検証が可能です。モニタカメラには、TANSO-FTSの単一の画素より広い視野と高い空間分解能があります。画像サイズと取得間隔は、地上からのコマンドにより選択することができます。たとえば4秒毎のように、インタフェログラム取得と同じ取得間隔に設定することによって、各インタフェログラムのシーン画像を取得することができます。カメラのデータは、ミッションデータプロセッサー(MDP)に転送されます。
TANSO-FTSのモニタカメラ緒元| 光学系(焦点距離) | 45.5 mm |
|---|---|
| アパーチャー | 5 mm |
| 検出器 | 2次元CMOS(約1,300,000画素) |
| VGAモード | 640×480のフレームレート > 5fps(フレーム/秒) |
| SXGAモード | 1280×1024のフレームレート > 5fps(フレーム/秒) |
| IFOV | < 100 m |
| FOV | > 2.58 ° |
特定点観測
地上から観測開始時間とポインティング角の組をアップロードすることにより、TANSO-FTSは、検証、代替校正および大都市、活火山、油田やガス田、家畜、ごみ埋立地などの大規模排出源のため、±20 °のAT角および±35 °のCT角の間で観測点を指向することができます。最大3,000組のAT角とCT角のパターンが、装置内のテーブルに登録されます。
研究公募に参加する研究チームやJAXAのオペレータは、特定点観測の要求を提出することができます。装置内メモリーに保持できる特定点観測点数には制限があり、新しい観測点が他の重要な観測点の継続的観測を阻害する可能性があるため、研究公募ユーザーの全ての要求が採用される訳ではありません。個々の研究公募ユーザーの要求の収集・調整はNIESが行います。第N週の観測についての特定点観測要求の締め切りは、第N-6週水曜日の日本時間10:00(標準時1:00)です。第N週の基本観測計画が第N-5週の終りに決定された後の細かな変更は可能ですが、D日の観測計画は、GOSATへのコマンド作成とアップロードの時間が不足するため、D-3日より後には変更できません

TANSO-FTSの特定点観測モードの観測ジオメトリ
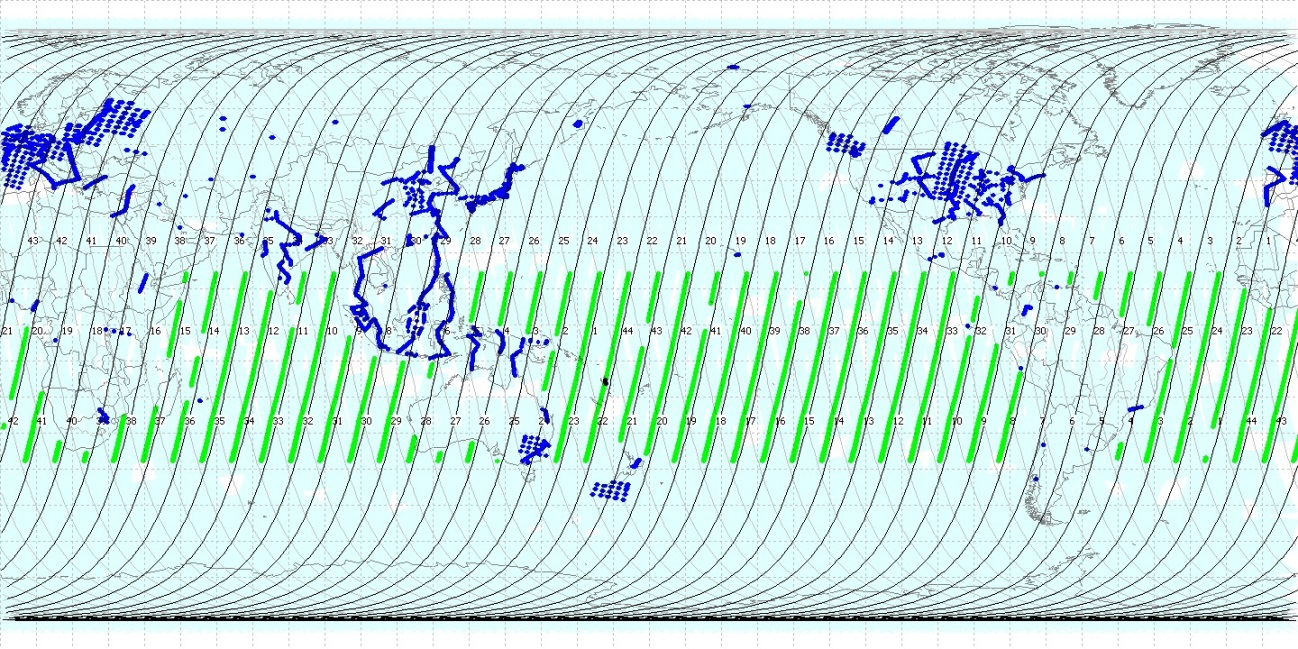
TANSO-FTSの観測パターンの例。緑色の点は、サングリント観測点を示し、青色の点は特定点観測の観測点を示します。
温度制御
TANSO-FTSとCAIの両方の光学系の温度は、23±3 °Cに制御されます。FTS機構部の変調効率は温度に依存するので、太陽照度校正の間隔である98分の軌道周期の間の安定性は、軌道周期内の一貫した応答のために重要です。98分以内の温度変動は約0.1 Kであり、応答の不安定性は無視できるくらい小さいです。
レベル1処理アルゴリズム
未処理のインタフェログラムの数値は全て、レベル1Aデータとして保存されます。衛星バスからのペイロード補正データ、および、TANSO-FTSのテレメトリデータは、測定データと合わせてレベル1Aおよび1Bの両方に追加されます。これらのデータには、データ処理や解析に必要な、タイムスタンプ、衛星および太陽の位置、地理位置情報、ポインティングミラーのAT角およびCT角、検出器温度、黒体温度、ゲインレベルが含まれます。データ中のタイムスタンプは、インタフェログラム取得の開始を示します。衛星位置は、衛星から毎秒送信されるペイロード補正データを使用して補間されます。AT、CT、太陽光の角度および幾何情報も、インタフェログラム取得の開始時に取得されます。
各バンドのインタフェログラム(バンド1、2、3の2つの直線偏光およびスカラーバンド4)は、個別に処理されます。TANSO-FTSのバンド1、2、3(SWIR)および4(TIR)は下記のフローチャートで示す手順で処理されます。
下記のフローチャートのボックスをクリックして、対応するデータ処理の説明を参照してください。 最新のプロダクトバージョンの説明は、GDASからオンラインで参照することができます。
TANSO-FTSレベル1データ処理フロー
インタフェログラム飽和検出
7つの全てのバンドについて、65,400を超えるデジタル値(DN)を含むインタフェログラムは検査で検出され、それぞれのZPD飽和フラグが立てられます。閾値は、いくらかのマージンを持たせるために、実際のダイナミックレンジより若干低い値に設定されています。バンド4には、下方の飽和閾値 136 もあります。
インタフェログラム工学値変換
インタフェログラムのDN値は、物理量(電圧)、すなわちアナログ値に変換されます。バンド4については、インタフェログラムのACとDCの両方の成分が記録され、それぞれが別個に変換されます。
非線形性補正(TIR)
信号用電子機器には検出器、アナログ回路、ADCの3つのブロックがあります。これらの中で、検出器は非線形性の最大の発生源です。バンド1のSi検出器と、バンド2および3のInGaAs検出器は十分に線形ですが、バンド4のPC-MCT検出器は非線形性を持っています。非線形性は、二次多項式を使用して補正します。非線形特性が打ち上げ後も経時的に変わらないことを前提として、各係数は、打ち上げ前に真空室の安定した条件で、特性のはっきりした大量の光子入力データから決定することができます。非線形性補正済みデータ は、下に記述された式(1)と(2)から、測定されたインタフェログラムの生のAC成分(電圧 VAC)およびDC成分(電圧 VDC)を使用して計算されます。VDCはインタフェログラム毎に取得する38個のDCサンプルの平均です。オフセット
は、下に記述された式(1)と(2)から、測定されたインタフェログラムの生のAC成分(電圧 VAC)およびDC成分(電圧 VDC)を使用して計算されます。VDCはインタフェログラム毎に取得する38個のDCサンプルの平均です。オフセット ,を差し引いていますが、この値は、おそらく電気回路の温度変化によって、打ち上げ後徐々に増加しています。は、DS観測データから推定され、打ち上げ時からの経過時間の関数としてモデル化されます。
,を差し引いていますが、この値は、おそらく電気回路の温度変化によって、打ち上げ後徐々に増加しています。は、DS観測データから推定され、打ち上げ時からの経過時間の関数としてモデル化されます。
 (1)
(1)
ゲイン係数  および
および  は、それぞれ0.681および110.103です。
は、それぞれ0.681および110.103です。
 (2)
(2)
 は、非線形性補正係数で0.6056です。
は、非線形性補正係数で0.6056です。
粗ZPD位置検出
ZPD位置は、インタフェログラムのセンターバースト(ピーク)を検索することで決定します。それは、バンド1、2、3では(DC除去済み)インタフェログラムの最大値の位置に対応します。バンド4では、AC成分の絶対値の最大値を検索します。それは、TIRバンドではピークが負の値になる可能性があるからです。ZPD位置は原則として7バンド全てで共通ですが、各バンドでZPD位置検出を実施します。
ZPD位置のシフト量が大きい場合でもスパイクやポインティングの揺らぎを正しく検出するために、この処理を適用する順番がL1B V201.201(V201)で変更(繰り上げ)されたことにご注意ください。
スパイク・ポインティング揺らぎ検出、ゲイン切り替え検出および補正(SWIR)
ゲイン変更による急激な変化、スパイク(おそらく宇宙線が原因)および著しい揺らぎのあるインタフェログラムが検出され、レベル1Bデータに品質フラグが付けられます。検出した急激な変化やスパイクの信号は、スパイクの前後で取得されたインタフェログラムの値を平均して得られるDC信号の推定値に置き換えられます。一部のインタフェログラムで見られる低周波の揺らぎは、ポインティンミラー機構の、不均一な観測点上での不安定な静定により発生します。この揺らぎは、後続の「強度変動補正」処理で補正されます。
インタフェログラムスパイク検出および補正(TIR)
スパイクまたは著しい揺らぎがあるインタフェログラムが検出され、レベル1Bデータに品質フラグを立てます。スパイクがある信号は、スパイクの前後で取得されたインタフェログラムの値を平均して得られるDC信号の推定値に置き換えられます。
強度変動補正
主に光学系の口径食とポインティングの揺らぎに起因する強度変動は、DC成分のあるインタフェログラムをその低周波成分で除算(規格化)することにより補正されます。規格化されたインタフェログラムには、ZPD付近で平均化されたDC成分の値が乗じられます。規格化の処理において、LIB V201では勾配のある直線のDC成分が、以前のバージョンのボックスカー型のDC成分の代わりに使用されます。この補正は、現状バンド2と3のみに適用されます。
低周波成分によるインタフェログラム飽和検出
飽和はDC成分のあるインタフェログラムの、ZPD付近の低周波成分を確認することにより検出されます。ゼロから負の方向への偏差は、センターバーストに飽和が存在することを示します。また、飽和は、TIRバンドで負のセンターバーストに発生する可能性もあり、このため、バンド4では正の方向への偏差もチェックされます。
インタフェログラムDC成分除去
L1B V161まで、DC成分は、インタフェログラム両端の100個の端フリンジを平均して得られる勾配のある直線により除去されています。この処理は、場合によっては、勾配のある直線の残存成分による不自然なスペクトルを作成します。L1B V201では、DC成分は、100個のフリンジ値を平均する代わりに端一点を使用して除去されます。
精ZPD位置検出およびZPDシフト欠損側ゼロ埋め
インタフェログラム中心近くで複数のピークがある場合、振幅からだけでは真のZPD位置を検出することが困難になります。その場合は、先におおまかにZPD位置を検出し(粗ZPD位置)、その後、各インタフェログラムのフリンジカウントエラー(FCE)を推定して、粗ZPD位置を調整します。FCE値は、対応する虚数スペクトルが最小限の構造を持つように決定します。最終のZPD値のみがレベル1Bプロダクトに保存されます。
光路差サンプリング不等間隔補正
理想的なインタフェログラムは、光路差(OPD)の全範囲にわたるレーザーフリンジの等しいサンプリング間隔により取得されます。しかし、実際の軌道上での間隔は光路差の増加に従い非線形に減少します。この非均一性に起因する誤差は、順方向データではノイズレベルに近いですが、逆方向スキャンのデータでは若干大きくなります。
光路差サンプリング不等間隔補正(SINUC)は、L1B V150で適用されました。しかし、インタフェログラムの両端に100個のゼロが埋められたことで、L1B V150処理でスペクトルに不自然な振動が意図せず取り込まれてしまいました。L1B V161処理では、この誤りを修正するために、SINUCを無効にしました。
L1B V201では、最大光路差の両端が滑らかに繋がるように、サンプリング不等間隔モデルを修正して、SINUCを再び適用しました。この補正は、L1B V150で見られたスペクトルの不自然な振動構造を生じさせることなく、順方向と逆方向のスキャンの整合性を改善しました。

順方向および逆方向スキャンの、光路差の関数としてのサンプリング間隔非均一性
強度依存位相ずれ補正(バンド1)
L1B V150およびV161のリリース後、高利得アンプ回路の強度依存位相ずれを、実験室でEMモデルを使用して測定しました[須藤ら、2014年]。さらに、軌道中の回路の位相ずれを、帯域外スペクトルを最小限にするパラメーターを見つけることにより推定しました。V150とV161では、高利得アンプの位相とローパスフィルタの振幅の非線形性を一組の三次多項式を使用して同時補正しましたが、LIB V201では、インタフェログラムをリサンプリングすることにより高利得アンプの位相を個別に補正します。

バンド1アナログ回路ブロック図
(実線)およびB(B1S)(点線)の高利得アナログ回路の強度依存位相。利得が大きいB1Sは、依存性がより大きい。")
バンド1P(B1P)(実線)およびB(B1S)(点線)の高利得アナログ回路の強度依存位相。利得が大きいB1Sは、依存性がより大きい。
アナログ回路非線形補正(バンド1)
バンド1の高ゲインは、ノイズのエイリアシングを避けるために、他のバンドより大幅にシャープな利得ピークとカットオフを持つチェビシェフフィルタ(ローパスフィルタ)を使用します。残念ながら、その利得は回路の静電容量に敏感であり、入力電圧、温度、時間によって変化します。入力電圧の変化により生じる非線形性は、三次多項式を使用して補正できます。その係数は、帯域外の不自然なスペクトルが最小限となるように決定します。バンド1の非線形性補正は、LIB V150とV161に適用されました。しかし、その非線形性補正では、入力レベル依存のオフセットや帯域外の不自然な信号を完全に取り除くことができないことが分かりました。それは高利得アンプとローパスフィルタ回路の双方に異なる特性の非線形性があるからです。L1B V201では、高利得アンプの強度依存位相ずれ補正を分離することで、同じ方法の非線形性補正(三次多項式の使用)が改善されています。
走査不安定補正(バンド1)
計測用レーザーの電子回路とサイエンス用回路の間の位相ずれの不一致は、スキャン速度の不安定性に対する耐性を損ない、スペクトルに不自然な信号を生成します。サハラ、アラビア、オーストラリアの砂漠など高反射率の地域や太陽照度校正に使用されるバンド1の中ゲインのみに、大きな不一致があります。この速度不安定性は、2つの正弦波微振動源、すなわち衛星姿勢制御の地球センサからの244 HzとFTS機構部の325.5 Hzの共振周波数により生じます。通常のスキャン速度は非常に一定であるため、インタフェログラムへのこれら2つの付加的変調はかなり純粋な正弦波振動となり、それらの振幅と位相を求めることにより、中ゲインで取得された各インタフェログラムを補正することができます。各インタフェログラムが処理される際、帯域外の不自然なスペクトルが最小となるようにこれらの4つのパラメーターが推定され、推定されたサンプリング位置に補間されます。
復インタフェログラム反転
逆方向スキャンのインタフェログラムのデータの順序は、その並びの向きが時間と整合するように反転されます。
素因数FFTのためのゼロ埋め、重み関数掛け合わせ(ZPDシフト100半フリンジ以上)
逆フーリエ変換に使用されるインタフェログラムデータの数は76,336です。一方、FFTのサイズとしては、バンド1、2、3に対して、76,545(=37×5×7)の素数の組み合わせが選択されてきました。バンド4については、使用されるインタフェログラムデータの数と、逆フーリエ変換のためのFFTのサイズは、それぞれ38,168と38,400(=29×3×52)です。FFTの入力ベクタルの不足を埋めるために、インタフェログラムデータ両端のゼロ埋めが行われます。
大きなZPDシフトは、インタフェログラムの一方の側の長さが十分でないために、分光分解能の変化を招きます。ZPDバイアスのあるインタフェログラムから最高分光分解能のデータを生成し、正確に均一な分解能のデータを全ミッション期間にわたって得るために、L1B V201でZPDバイアス補正が導入されました。バイアスのあるインタフェログラムは、重み関数が乗じられた後、通常のインタフェログラムの場合と同じ長さでフーリエ変換されます。不自然な信号の発生を抑制するために、両端部分で滑らかな重みを使用します。重みが2または0となる領域は、ZPDバイアスにより変化します。ZPDシフトが100半レーザーフリンジより小さい場合は、重み関数は適用されません。2014年6月以降、ほとんど全てのデータは重み関数を使用して処理され、その結果、インタフェログラム当たりのサンプリング点数がバイアス値によって減少したため、信号対雑音比(SNR)が若干小さくなりました。全てのL1B V201プロダクトに固定のILSFを適用することができます。V201用のILSFモデルは、NIES GDASから提供されています。

バージョン201用の重み関数を使用したZPDバイアス補正
I-FETおよび位相補正(SWIR)
素因数I-FFTによるインタフェログラムからスペクトルへの変換が実施され、続いて位相が補正されます。位相は、虚数と実数のスペクトルの比率から求めることができます。吸収の強い波長位置では、算出された位相の雑音が非常に多く、最高分解能で使用すると過補正されます。位相を決定する際の分光分解能を大幅に低下させることで、滑らかな位相構造をより正確に得ることができます。分解能を低下させた位相は、正規分布型アポダイゼーションにより得られます。
逆フーリエ変換(TIR)
インタフェログラムは、素因数I-FFTによってスペクトルに変換されます。位相補正は、TIRバンドデータでは実施されません。ビームスプリッター(ZnSe)からの輻射の影響は、14µm付近の長波長域を除いて、無視できると考えられます。
ZPD通過時刻計算
テレメトリデータのタイムスタンプは、ターンアラウンド完了時刻TTATであり、インタフェログラム取得の開始に対応します。ZPD付近のインタフェログラムは最も重要な情報を有しており、ZPD通過時刻は次の関係を使用して計算されます。
 (3)
(3)
ここで、TSはスキャン時間、Xzpdは1-76336の中央値付近のZPD位置です。
感度・偏光校正(TIR)
分光放射輝度は、式 (4)で表わされる、DSおよびBBスペクトルの複素校正により計算されます。
 (4)
(4)
上式で、 、
、 、
、 は、それぞれ直下観測、DS、BBの観測スペクトルを意味します。記号
は、それぞれ直下観測、DS、BBの観測スペクトルを意味します。記号 および
および は、FTS機構部の波数とスキャン方向です。実効分光放射輝度
は、FTS機構部の波数とスキャン方向です。実効分光放射輝度 は、次式により計算されます。
は、次式により計算されます。
 (5)
(5)
背景温度 が黒体の温度に近いと仮定して、放射率
が黒体の温度に近いと仮定して、放射率 として1を使用します。は、さらに偏光効果を補正します。L1B V130で導入された深宇宙視野遮蔽補正は、V161以降実施されていません。
として1を使用します。は、さらに偏光効果を補正します。L1B V130で導入された深宇宙視野遮蔽補正は、V161以降実施されていません。
3日回帰×4回の観測パターン
①(3日間)限定的な校正、及び検証サイト(2016年1月11日まで)
(3日間)サングリント、校正及び検証サイト(2016年1月12日から)
②(3日間)サングリント、校正及び検証サイト、RA要求による特定点観測
③(3日間)サングリント、校正及び検証サイト
④(3日間)サングリント、校正及び検証サイト、RA要求による特定点観測
グリント観測
2010年8月2日以降
グリント観測中のIMC(image motion compensation)駆動が開始されました。
2013年5月6日以前
地軸の向きによってグリント領域が変わるため、鏡面観測が可能な衛星位置を2ヶ月毎に計算・計画し、グリント観測点を行っていました。
2013年5月6日以降
グリント観測領域を拡張するため、太陽に対する地軸の傾斜が最大となる夏季と冬季のジオメトリでグリント観測を決定し、年間を通して調整しています。グリント観測の緯度帯は2014年9月10日、2015年6月2日、2016年1月5日の計3回、3度ずつ拡張しました。厳密な鏡面反射点だけであく、太陽-衛星を含む海面と直交する主平面上の高輝度部分を観測することで海上の観測緯度範囲を拡張しています。
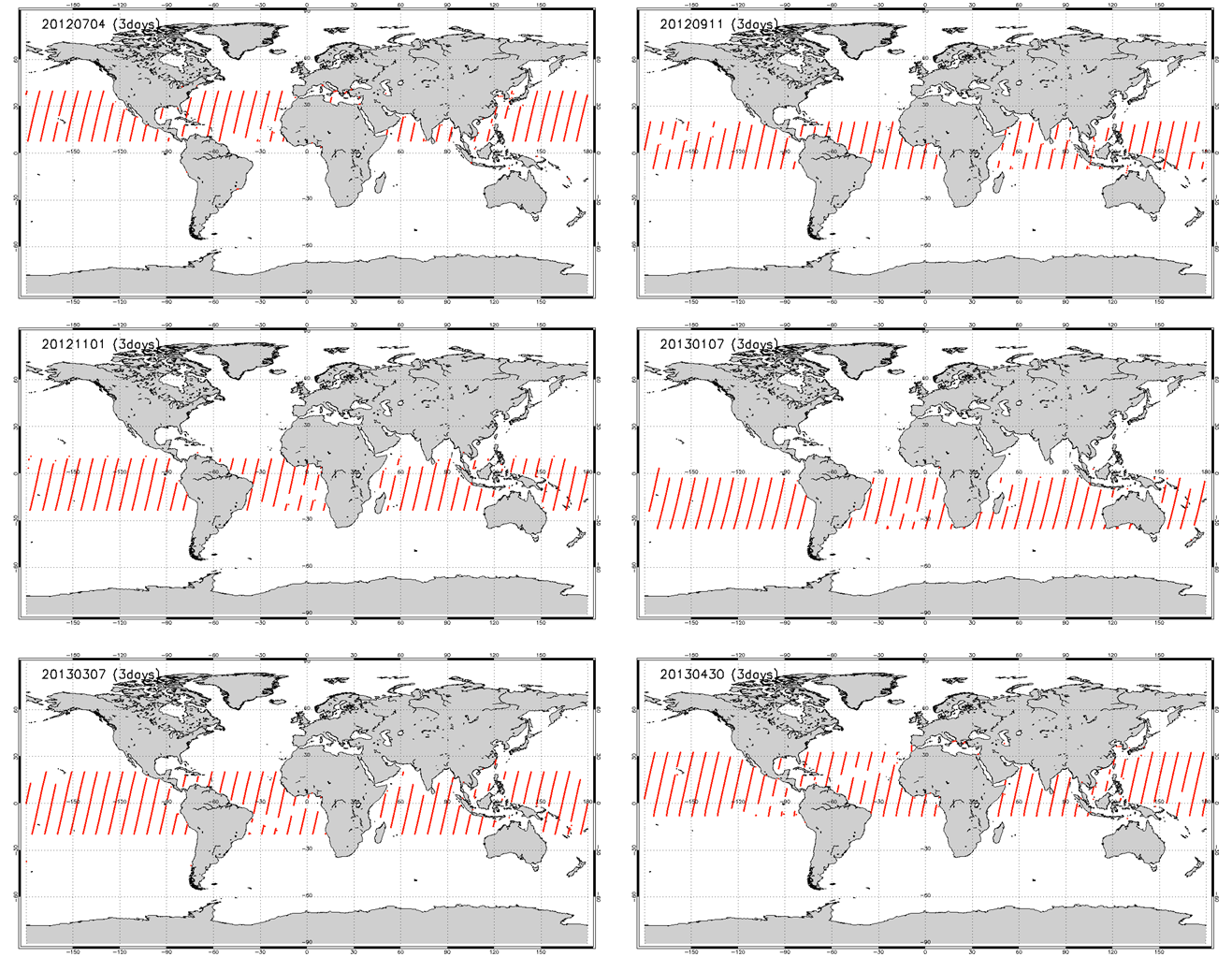
2013年5月6日以前の3日間のグリント観測の例。季節ごとに異なる観測計画を使用した。
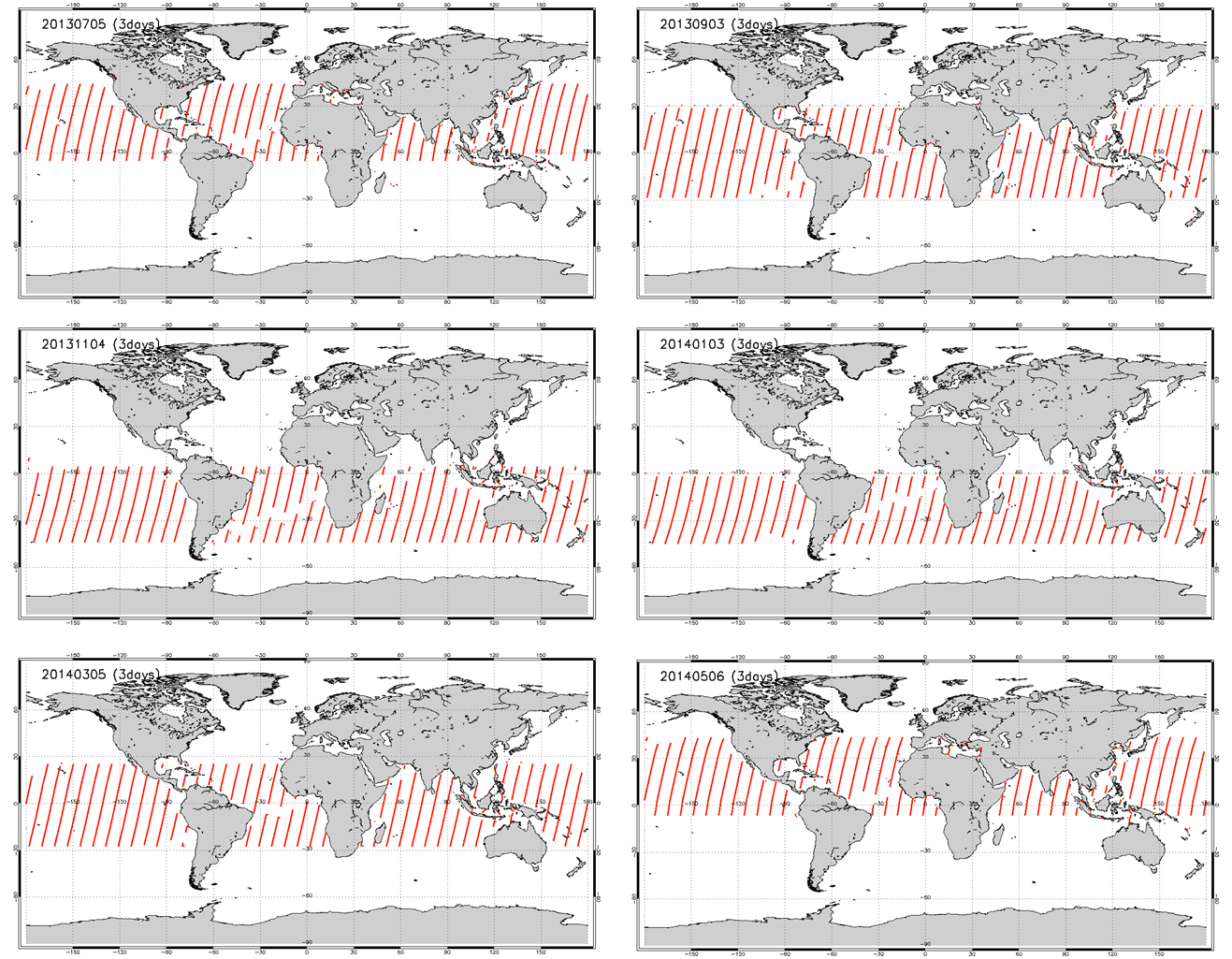
2013年5月6日以降の3日間のグリント観測の例。共通のグリント観測計画は年間を通して使用された。
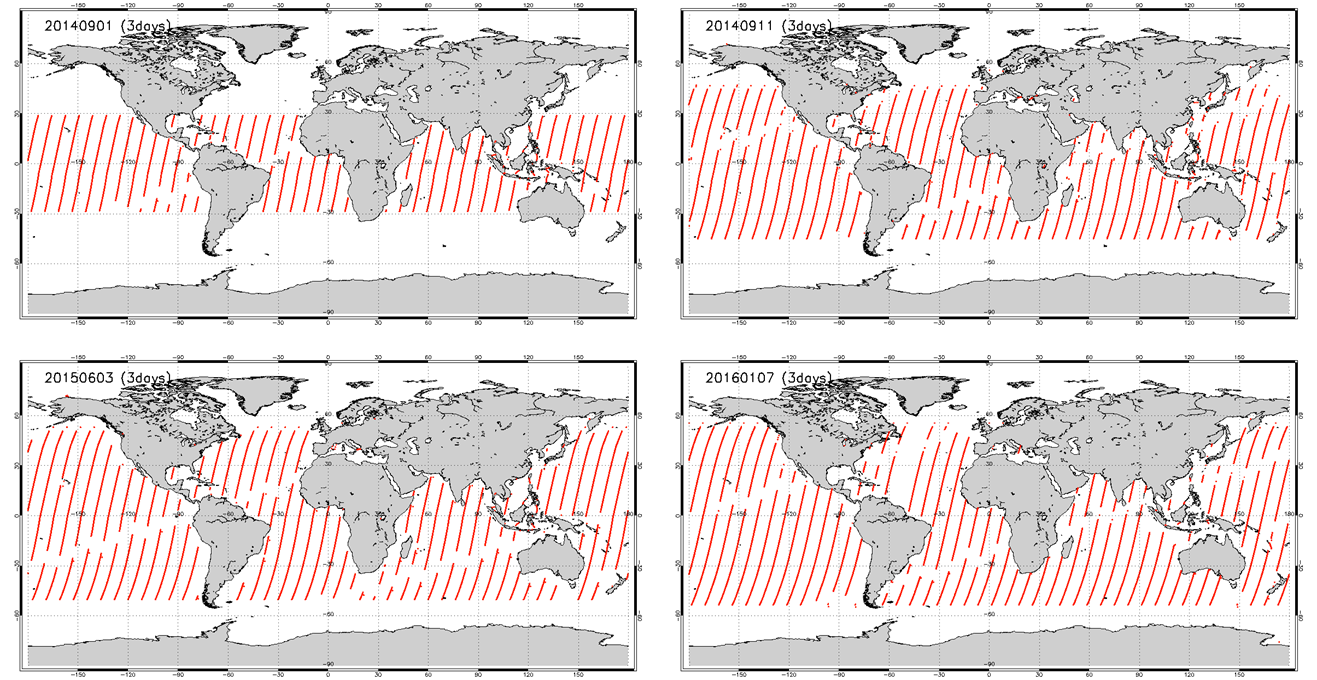
グリント観測領域の段階的な拡張図。それぞれのマップは、異なる緯度帯拡張のグリント観測(3日間)を示している。上段左 : 拡張前、上段右 : 2014年7月10日の1回目の拡張以降、下段左 : 2015年6月2日の2回目の拡張以降、下段右 : 2016年1月5日の3回目の拡張以降
